
STM32F3 Anleitung
Technische Daten, Hinweise und Programmier-Beispiele auf Basis der CMSIS für STM32F3 Mikrocontroller.
Meine Codeschnipsel sollen bei den ersten Schritten helfen, den Mikrocontroller kennen zu lernen und das Arbeiten mit dem Referenzhandbuch zu erlernen. Sie sind daher absichtlich minimalistisch gehalten, dafür umso besser kommentiert.
Modell Bezeichnungen
Der Hersteller hat sich für die Bezeichnung seiner Mikrocontroller folgendes Schema ausgedacht:
|
Low Power Familie
STM32L0 Serie: ARM Cortex M0+ bis 32 MHz, mit EEPROM
STM32L1 Serie: ARM Cortex M3 bis 32 MHz STM32L4 Serie: ARM Cortex M4F bis 80 MHz mit FPU STM32L5 Serie: ARM Cortex M33F bis 110 MHz mit FPU STM32U5 Serie: ARM Cortex M33F bis 160 MHz
Mainstream Familie
STM32F0 Serie: ARM Cortex M0 bis 48 MHz
STM32G0 Serie: ARM Cortex M0+ bis 64 MHz STM32F1 Serie: ARM Cortex M3 bis 72 MHz
STM32F3 Serie: ARM Cortex M4F bis 72 MHz mit FPU
STM32G4 Serie: ARM Cortex M4F bis 170 MHz
High Performance Familie
STM32F2 Serie: ARM Cortex M3 bis 120 MHz
STM32F4 Serie: ARM Cortex M4F bis 180 MHz mit FPU STM32F7 Serie: ARM Cortex M7F bis 216 MHz mit FPU STM32H7 Serie: ARM Cortex M7F bis 400 MHz mit FPU |
Hinter der Modellnummer: | ||||||||||||
|
Anzahl der Pins
K = 32 Pins
T = 36 Pins C = 48 Pins R = 64 Pins V = 100 Pins Z = 144 Pins |
|||||||||||||
|
Flash Größe
4 = 16 kB
6 = 32 kB 8 = 64 kB B = 128 kB C = 256 kB D = 384 kB E = 512 kB |
|||||||||||||
|
Gehäuse
H =
T = U = Y = |
|||||||||||||
|
Temperaturbereich
6 = -40 bis +85 °C
7 = -40 bis +105 °C |
Beispiel: Der STM32F303CBT6 hat 48 Pins, 128 kB Flash, 40 kB RAM, ein QFP Gehäuse und ist für -40 bis +85 °C
Dokumentationen
Die Pinbelegung und elektrischen Daten stehen im jeweiligen Datenblatt. Für den Programmierer ist das Reference Manual am wichtigsten, da es die I/O Funktionen und Register beschreibt. Im Errata Sheet beschreibt der Hersteller überraschende Einschränkungen und Fehler der Mikrochips, teilweise mit konkreten Workarounds.
| Flash Size | 16 kB | 32 kB | 64 kB | 128 kB | 256 kB | 384 kB | 512 kB | |||
| RAM Size | 16 kB | 16 kB | 16 kB | 24/32/40 kB | 32/40/48 kB | 64/80 kB | 64/80 kB | |||
| Model ↱ | x4 | x6 | x8 | xB | xC | xD | xE | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Access line | STM32F301 | , | ||||||||
| USB & CAN line | STM32F302 | , | , | , | ||||||
| Performance line | STM32F303 | , | , | , | ||||||
| Digital Power line | STM32F334 | , | ||||||||
| Precision Measurement line | STM32F373 | , | ||||||||
| alle | ||||||||||
Weiterführende Doku:
- Technische Dokumentationen von ST z.B. Application Notes
- STM32 F3 HAL User Manual Beschreibung des Cube HAL Frameworks, das Cube MX verwendet
- Einblick in die moderne Elektronik ohne viel Theorie Anleitung für den Einstieg
- Newlib Dokumentation der Standard-C Library
- The Definitive Guide to ARM Cortex-M3 and Cortex-M4 Processors von Joseph Yiu
- ARM Cortex M4 Technical Reference Manual Beschreibung des CPU Kerns
Elektrische Daten
Alle hier gezeigten STM32F3 Chips kann man mit 2,0 bis 3,6 Volt betreiben. OPAMP und DAC benötigen aber mindestens 2,4 Volt und die USB Schnittstelle läuft nur mit 3,3 V.
Die Stromaufnahme ist im laufenden Betrieb mit 8bit Mikrocontrollern vergleichbar, im Stop Modus ist sie jedoch deutlich höher. Für langfristigen Batteriebetrieb wird daher auf die sparsame L0 Serie verwiesen.
Viele I/O Pins sind 5 V tolerant. Bei den STM32F303 Modellen sind das: PA8-15, PB3-9, PC7-12,
PD0-7, PE0-7, PF0, PF1, PF6, PF9, PF10
Im open-drain Modus dürfen die 5 V toleranten Ausgänge durch externe Widerstände auf 5 V hoch
gezogen werden.
Die Ausgänge sind einzeln mit 25 mA und alle zusammen mit 80 mA belastbar. Gültige Logikpegel sind aber nur bis 8 mA garantiert. Die Ausgänge sind nicht Kurzschluss-fest.
Die Eingänge sind sehr hochohmig (da CMOS) und haben einen Schmitt-Trigger. Die ESD Schutzdioden sind teilweise nur sehr bedingt belastbar. Die internen Pull-Up und Pull-Down Widerstände haben ungefähr 40 kΩ. Alle I/O Pins haben ungefähr 5 pF Kapazität.
Der NRST (Reset) Pin hat intern einen Pull-Up Widerstand und kann sowohl vom Chip selber als auch von außen auf Low gezogen werden. Intern erzeugte Reset-Impulse sind garantiert mindestens 20 µs lang.
Besondere Ausnahmen
Für die Pins PC13, PC14 und PC15 gelten folgende Einschränkungen:
- Sie dürfen bei HIGH Pegel keinen Strom liefern.
- Sie dürfen bei Low Pegel maximal 3mA aufnehmen.
- Sie dürfen nur mit maximal 2 MHz angesteuert werden und mit maximal 30 pF belastet werden.
Hintergrund ist, dass diese drei Pins intern am (schwachen) Power-Switch der RTC hängen.
Boards
Nucleo-F303RE
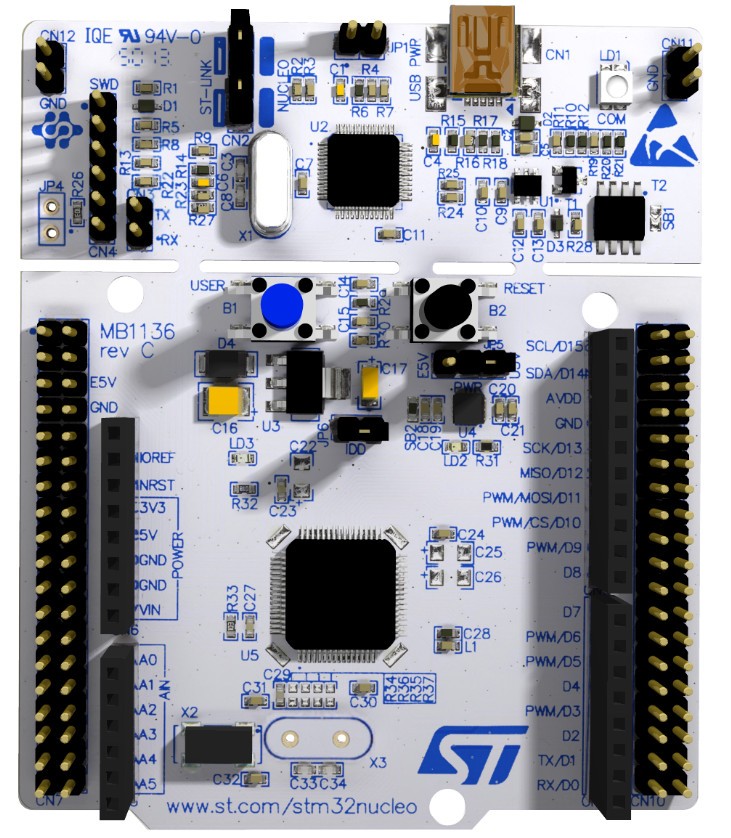
Das Nucleo-F303RE Board (aus der Nucleo-64 Reihe) ist ein hochwertiges Starter-Set zum günstigen Preis um 15 €.
- ARM Cortex-M4F Mikrocontroller Modell STM32F303RET6
- max. 72 MHz
- 512 kB Flash
- 80 kB RAM
- 51·GPIO Pins auf Stiftleisten herausgeführt
- 4·ADC 12bit mit insgesamt 22 Eingängen
- 2·DAC, 3·I²C, 5·USART, 4·SPI, 1·USB, 1·CAN, 12·DMA, 8·16bit Timer, 1·32bit Timer, RTC mit Kalender
- 8 MHz Hauptquarz und 32,768 kHz Uhrenquarz
- Eine programmierbare LED an PA5, die bei High Pegel leuchtet
- Ein programmierbarer Taster, der PC13 auf Low zieht, mit Pull-Up Widerstand
- Reset Taster
- Stromversorgung wahlweise über USB, 7-12 V, 5 V oder 3,3 V
- Buchsenleisten für Arduino Shields (aber nur einige Pins vertragen 5 Volt!)
- Abtrennbarer ST-Link Adapter in Version 2.1
- Zum Programmieren
- Zum Debuggen
- Virtueller Memory-Stick über den man Programme mit dem Dateimanager hochladen kann
- Virtueller COM Port (USB-UART) verbunden mit USART2, unterstützt 600 bis 2000000 Baud
- Der ST-Link kann für alle STM32 Mikrocontroller benutzt werden
Der 8 MHz Hauptquarz befindet sich auf dem ST-Link Adapter, er versorgt beide Mikrocontroller. Wenn man den ST-Link abtrennt, muss man den Mikrocontroller mit seinem internen R/C Oszillator betreiben oder einen zusätzlichen Quarz in die verbleibende Platine einlöten.
Die beiden Stifte Rx/D0 und Tx/D1 am rechten Arduino Connector haben keine Funktion.
Das User Manual enthält die vollständige Beschreibung des Boardes.
Nucleo-F303K8
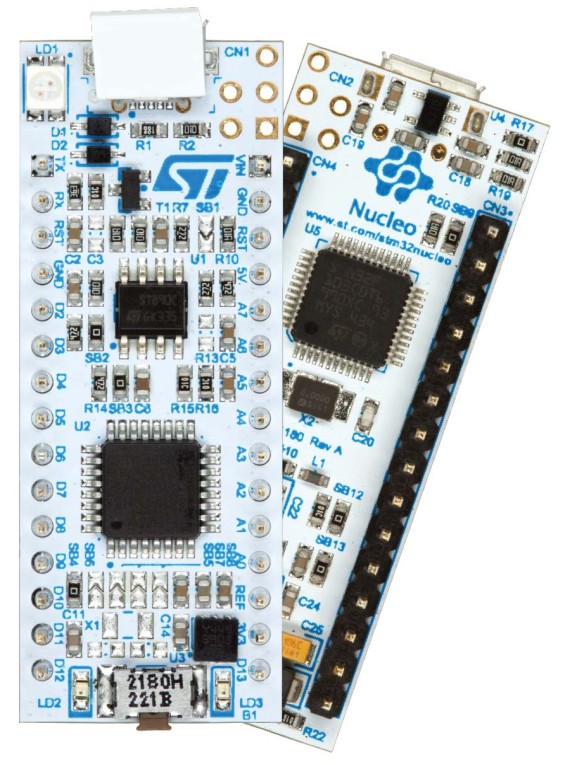
Das Nucleo-F303K8 Board (aus der Nucleo-32 Reihe) ist deutlich kleiner, obwohl es ebenfalls einen ST-Link Adapter enthält. Es kostet üblicherweise etwa 10 €.
- ARM Cortex-M4F Mikrocontroller Modell STM32F303K8T6
- max. 72 MHz
- 64 kB Flash
- 16 kB RAM
- 22·GPIO Pins auf Stiftleisten herausgeführt
- 2·ADC 12bit mit 8 Eingängen
- 2·DAC, 1·I²C, 2·USART, 1·SPI, 1·CAN, 7·DMA, 7·16bit Timer, 1·32bit Timer, RTC mit Kalender
- Kein USB
- 8 MHz Hauptquarz und 32,768 kHz Uhrenquarz
- Eine programmierbare LED an PB3, die bei High Pegel leuchtet
- Reset Taster
- Stromversorgung wahlweise über USB, 7-12 V, 5 V oder 3,3 V
- Arduino Nano kompatible Stiftleisten, aber nicht alle Pins vertragen 5V
- ST-Link Adapter in Version 2.1
- Zum Programmieren
- Zum Debuggen
- Virtueller Memory-Stick über den man Programme mit dem Dateimanager hochladen kann
- Virtueller COM Port (USB-UART) verbunden mit USART2, unterstützt 600 bis 2000000 Baud
- Kein Trace-SWO
Der eingebaute ST-Link Adapter kann nicht abgetrennt werden und er kann auch nicht zum Programmieren anderer Mikrocontroller verwendet werden.
Das User Manual enthält die vollständige Beschreibung des Boardes.
STM32F3 Discovery

Das STM32F3 Discovery Board bietet neben dem üblichen ST-Link Adapter eine USB-Buchse, die mit dem Target Mikrocontroller verbunden ist. Im Gegensatz zu den obigen Boards ist dieses mit viel mehr I/O Pins, einigen Sensoren und mehr LEDs ausgestattet, dennoch kostet es ebenfalls nur etwa 15 €.
- ARM Cortex-M4F Mikrocontroller Modell STM32F303VCT6
- max. 72 MHz
- 256 kB Flash
- 48 kB RAM
- 87·GPIO Pins auf Stiftleisten herausgeführt
- 2·ADC 12bit mit insgesamt 39 Eingängen
- 2·DAC, 2·I²C, 5·USART, 3·SPI, 1·USB, 1·CAN, 12·DMA, 9·16bit Timer, 1·32bit Timer, RTC mit Kalender
- 8 MHz Hauptquarz, man kann einen 32,768 kHz Uhrenquarz nachrüsten
- Acht programmierbare LEDs an PE9, PE8, PE10, PE15, PE11, PE14, PE12 und PE13, die bei High Pegel leuchten
- Ein programmierbarer Taster, der PA0 auf High zieht, mit Pull-Up Widerstand
- Reset Taster
- Gyroskop-Sensor L3GD20 an I²C oder SPI an PE3 und PA5-7, sowie zwei Interrupts and PE0 und PE1.
- Beschleunigungs- und Kompass-Sensor LSM303DLHC an I²C PB6 und PB7, sowie zwei Interrupts and PE4 und PE5.
- Stromversorgung wahlweise über USB, 5 V oder 3,3 V
- ST-Link Adapter in Version 2.0-A oder 2.0-B
- Zum Programmieren
- Zum Debuggen
- Nur v2.0-B: Virtueller Memory-Stick über den man Programme mit dem Dateimanager hochladen kann
- Nur v2.0-B: Virtueller COM Port (USB-UART) verbunden mit USART1, unterstützt 600 bis 2000000 Baud
- Der ST-Link kann für alle STM32 Mikrocontroller benutzt werden
Das User Manual enthält die vollständige Beschreibung des Boardes.
STM32F303CCT6 Mini System Dev.board

Das STM32F303CCT6 Board von RobotDyn ist dem Blue-Pill Board nachempfunden, nur mit einem aktuelleren Mikrocontroller Modell.
- ARM Cortex-M4F Mikrocontroller Modell STM32F303CCT6
- max. 72 MHz
- 256 kB Flash
- 48 kB RAM
- 28 nutzbare GPIO Pins herausgeführt
- +2 wenn man auf USB verzichtet (PA11, PA12)
- +2 wenn man auf den Uhrenquarz verzichtet (PC14, PC15)
- 2·ADC 12bit mit 14 Eingängen
- 2·DAC, 2·I²C, 3·USART, 3·SPI, 1·USB, 1·CAN, 12·DMA, 9·16bit Timer, 1·32bit Timer, RTC mit Kalender
- 8 MHz Hauptquarz und 32,768 kHz Uhrenquarz (auf der Rückseite)
- Ein Jumper für den Boot Modus und ein Jumper an PB2 für freie Verwendung
- Eine programmierbare blaue LED an PC13, die bei Low Pegel leuchtet
- Die Power LED ist grün
- Reset Taster
- Stromversorgung wahlweise über USB, 3,3 V oder 5 V
- Separate Stiftleiste für die SWD Schnittstelle zum Anschluss des Debuggers
Das Board ist etwas schmaler, als das altbekannte Blue-Pill Board. Die Stiftleisten haben trotzdem den gleichen Abstand und die gleiche Pinbelegung. Der Uhrenquarz wurde auf die Rückseite verlegt.
Wenn man besonders dünne Stiftleisten verwendet, passt das Board in einen 40-poligen DIP Sockel.
Die Firmware installiert man wahlweise über USART1, USB oder über SWD mit einem ST-Link Adapter.
Wenn der Uhrenquarz benutzt wird, soll man die Stifte an PC14 und PC15 entfernen, damit er stabil schwingt.
Der Spannungsregler kann leicht überhitzen wenn man ihn mit zusätzlichen Verbrauchern belastet.
Software
Tools
Entwicklungsumgebungen (du brauchst nur eine):
- STM32 Cube IDE, enthält Cube MX, Hinweise dazu
- GNU MCU Plugins für Eclipse
- VisualGDB Plugin für Visual Studio (nur Windows)
- stm32-for-vscode Plugin für Visual Studio Code
- Keil MDK kostenpflichtig, für Profis (nur Windows)
Weitere Software:
- STM32 Cube MX Code-Generator für HAL, wurde in die Cube IDE integriert
- STM32 Cube Programmer zum Flashen mit ST-Link Adapter, seriellem Port oder USB
- ST-Link Utility zum Anzeigen von Trace Meldungen und Flashen mit ST-Link Adapter (veraltet, nur Windows)
- Flash Loader Demonstrator zum Flashen über den seriellen Bootloader (veraltet, nur Windows)
- DfuSe zum Flashen über den USB Bootloader (veraltet, nur Windows)
- ST-Link Tool zum Flashen mit ST-Link Adapter
- STM32 Flash zum Flashen über den seriellen Bootloader
- CMSIS Core Paket für alle STM32 habe ich 2022 aus den Cube HAL Paketen extrahiert
Bibliotheken
Die Basis-Library für alle ARM Cortex-M Mikrocontroller heisst CMSIS Core. Dabei handelt es sich im Grunde genommen um einen Haufen Definitionen für alle Register, damit man sie mit Namen statt über Hexadezimal-Codes ansprechen kann. Außerdem enthält die CMSIS wenige Hilfsfunktionen, die den ARM Kern konfigurieren. Die CMSIS ist von ARM spezifiziert und wird von allen Chip Herstellern in spezifischen Varianten bereit gestellt. ST hat ein paar hilfreiche Makros hinzugefügt, wie MODIFY_REG().
Darauf aufbauend stellt die Firma ST ihr proprietäres Cube HAL Framework bereit, das die Programm Cube MX (welches in die IDE integriert wurde), womit man Quelltext-Projekte einschließlich Code zur Konfiguration der I/O Funktionen und Taktversorgung erzeugt.
Ich empfehle, die Programmierung zunächst anhand des Referenzhandbuches (ohne HAL) zu lernen. So lernt man die Grundlagen, mit denen man die Funktionsweise der knapp dokumentierten HAL besser durchblickt.
Der arm-gcc Compiler bringt die Standard-C Bibliotheken mit, denen ich weiter unten ein eigenes Kapitel gewidmet habe.
Beispielprogramm
Beispiel für einen einfachen LED-Blinker an PA5 und PC13 auf Basis der CMSIS:
// Filename: main.c
#include <stdint.h>
#include "stm32f3xx.h"
// delay loop for the default 8 MHz CPU clock with optimizer enabled
void delay(uint32_t msec)
{
for (uint32_t j=0; j < msec * 2000; j++)
{
__NOP();
}
}
int main()
{
// Enable Port A and C
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN + RCC_AHBENR_GPIOCEN);
// PA5 and PC13 = Output for LEDs
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER5, 0b01 << GPIO_MODER_MODER5_Pos);
MODIFY_REG(GPIOC->MODER, GPIO_MODER_MODER13, 0b01 << GPIO_MODER_MODER13_Pos);
while(1)
{
// LED Pin -> High
WRITE_REG(GPIOA->BSRR, GPIO_BSRR_BS_5);
WRITE_REG(GPIOC->BSRR, GPIO_BSRR_BS_13);
delay(500);
// LED Pin -> Low
WRITE_REG(GPIOA->BSRR, GPIO_BSRR_BR_5);
WRITE_REG(GPIOC->BSRR, GPIO_BSRR_BR_13);
delay(500);
}
}
Ich weiß dass man Delays besser mit einem Timer realisiert. Hier wollte ich jedoch ein möglichst simples Programmbeispiel zeigen.
Programmier- und Debug-Schnittstellen
SWJ Debug Port
Mit dem SWJ Debug Port übertragt man das fertige Programm in den Mikrocontroller und kann es im laufenden Betrieb untersuchen. Zum Beispiel kann man das Programm jederzeit anhalten und dann den Inhalt des Speichers anschauen. Wenn es hängt, kann der Debugger anzeigen, wo das passiert. Der Debugger kann sogar melden, wenn ausgewählte Variablen verändert werden.
SWJ ist die einzige Schnittstelle, die von der Cube IDE unterstützt wird. Sie funktioniert unabhängig von Boot Modus, Taktquelle, Spannung und Temperatur. Die SWJ Schnittstelle ist nach dem Reset standardmäßig aktiviert, kann jedoch per Software deaktiviert werden.
Achtung: Die Schnittstelle funktioniert nicht im Stop, Standby und Sleep Modus!
Die SWJ Schnittstelle unterstützt zwei Übertragungsprotokolle: JTAG und SWD. Das neuere SWD Protokoll wird bevorzugt, da es schneller ist und nur drei Leitungen benötigt: GND, SWDIO und SWCLK.
ST-Link Adapter
Der dazu passende USB Adapter heisst "ST-Link", es muss Version 2.0 oder neuer sein. Man kann den ST-Link Adapter des Nucleo-64 Boardes abtrennen, um damit andere Mikrocontroller zu programmieren. Oder man zieht die beiden Jumper ab, wodurch die Leitungen SWCLK und SWDIO unterbrochen werden.

Er ist folgendermaßen mit dem Mikrocontroller verbunden:
| ST-Link CN4 | Mikrocontroller | Beschreibung | ||
|---|---|---|---|---|
| Pin 1 | ← | VDD | Misst die Spannungsversorgung der Zielschaltung, optional | |
| Pin 2 | → | SWCLK | PA14 | Serial Wire Clock |
| Pin 3 | GND | Common Ground (Masse) | ||
| Pin 4 | ↔ | SWDIO | PA13 | Serial Wire Data In and Out |
| Pin 5 | → | NRST | Reset Signal, optional siehe Verbindungsoptionen in der Cube IDE | |
| Pin 6 | ← | SWO | PB3 | Serial Wire Output, optional siehe Trace Meldungen ausgeben |
Außerdem enthalten diese ST-Link Modelle auch einen USB-UART Adapter mit den Anschlüssen Tx und Rx.
Die Cube Programme verlangen nach einem Firmware-Update, was auch auf nicht originalen ST-Links in der Regel problemlos klappt. Die anderen oben genannten Programme sind hingegen auch mit älteren Firmware Versionen zufrieden.
Viele Windows Programme benötigen den libusb-win32 Treiber, um den ST-Link anzusteuern. Falls dieser fehlt oder nicht richtig geladen wird, siehe hier.
Bei den chinesischen ST-Link v2 Sticks empfehle ich, die Rückseite der Platine mit Gewebeband abzudecken, damit kein Kurzschluss zum Aluminium-Gehäuse entsteht. Ihr Reset-Ausgang funktioniert nur mit STM8. Wer eine ruhige Hand hat, kann sich eine SWO Leitung nachrüsten:

SWJ Deaktivieren
Um die betroffenen Pins für normale Ein-/Ausgabe zu verwenden, stellt man im Register GPIOx->MODER einfach den gewünschten Modus ein (Input, Output oder Analog).
Auch wenn PB3 per Software als normaler I/O Pin konfiguriert wurde, kann er trotzdem mit dem ST-Link Adapter als SWO Ausgang umgestellt werden.
Trace Meldungen ausgeben
Man kann den SWO (=PB3) Ausgang des Mikrocontrollers dazu benutzen, Diagnose Meldungen auszugeben. Diese Schnittstelle ist effizienter als USART, weil ihre Bitrate höher ist (nämlich 1/4 der CPU Taktfrequenz) und weil sie über einen kleinen FIFO Puffer (10 Bytes) verfügt.
SWO wird mit dem ST-Link Adapter aktiviert und empfangen. Dann ist PB3 vorübergehend ein Ausgang mit Ruhe-Pegel High. Während der seriellen Datenübertragung liefert er Low-Impulse.
Die CMSIS Funktion ITM_SendChar() gibt ein Zeichen auf der SWO Leitung aus. ITM bedeutet "Instrumentation Trace Message":
#include <stdint.h>
#include "stm32f3xx.h"
// delay loop for the default 8 MHz clock with optimizer enabled
void delay(uint32_t msec)
{
for (uint32_t j=0; j < msec * 2000; j++)
{
__NOP();
}
}
// Output a trace message
void ITM_SendString(char *ptr)
{
while (*ptr)
{
ITM_SendChar(*ptr);
ptr++;
}
}
int main()
{
while (1)
{
ITM_SendString("Hello World!\n");
delay(500);
}
}
Siehe auch meine Hinweise zur Cube IDE, wie man die Meldungen damit anzeigt.
Boot Loader
Neben der SWJ Schnittstelle haben alle STM32 auch einen unveränderlichen Bootloader, über den man Programme hochladen kann. Er ermöglicht Zugriff auf den Flash Speicher, das RAM und die Option Bytes, zum Debuggen eignet er sich jedoch nicht.
Der Bootloader unterstüzt folgende Anschlüsse:
| Modell | USART | USART | USB | I2C |
|---|---|---|---|---|
| TxD,RxD | TxD,RxD | D-,D+ | SCL,SDA | |
| STM32F301xx | PA9,10 | PA2,3 | ||
| STM32F302x6 and x8 | PA9,10 | PA2,3 | PA11,12 | |
| STM32F302xB and xC | PA9,10 | PD5,6 | PA11,12 | |
| STM32F302xD and xE | PA9,10 | PA2,3 | PA11,12 | |
| STM32F303x6 and x8 | PA9,10 | PA2,3 | PB6,7 | |
| STM32F303xB and xC | PA9,10 | PD5,6 | PA11,12 | |
| STM32F303xD and xE | PA9,10 | PA2,3 | PA11,12 | |
| STM32F334xx | PA9,10 | PA2,3 | PB6,7 | |
| STM32F373xx | PA9,10 | PD5,6 | PA11,12 |
Zur Konfiguration des Bootloaders dient der Boot0 Pin und das Flag Boot1 in den Option Bytes (die mit der Programmiersoftware einstellbar sind):
| Boot0 | Boot1 | Starte von |
|---|---|---|
| Low | egal | Flash ab Adresse 0x0800 0000, gemappt auf 0x0000 0000 |
| High | Low | Bootloader |
| High | High | RAM ab Adresse 0x2000 0000, gemappt auf 0x0000 0000 |
Boot0 und Boot1 werden beim Reset und beim Aufwachen aus dem Standby Modus gelesen. Um den Bootloader zu aktivieren, setzt man den Pin Boot0=High und dann drückt man den Reset Knopf.
Weitere Informationen zum Bootloader stehen in der Application Note AN2606.
Serieller Bootloader
Die Verbindung zum PC wird mit einem USB-UART Adapter wie diesem hergestellt:

Folgende Verbindungen sind nötig:
| PC USB-UART | STM32F3 USART | Beschreibung | |
|---|---|---|---|
| TxD | → | RxD | Daten |
| RxD | ← | TxD | Daten |
| GND | GND | Gemeinsame Masse |
Als Taktquelle dient der interne R/C Oszillator, dessen Frequenz bei 3,3 V und Zimmertemperatur meistens ausreichend genau ist. Der Bootloader erkennt die Baudrate automatisch. Es werden 8 Datenbits und gerade Parität (even) verwendet.
USB Bootloader
Der USB Bootloader funktioniert nur, wenn ein Quarz mit 24, 18, 16, 12, 9, 8, 6, 4 oder 3 MHz angeschlossen ist. An PA12 gehört ein 1,5 kΩ Pull-Up Widerstand nach 3,3V.
Um den USB Bootloader unter Linux nutzen zu können, muss man die Software von ST mit "sudo" starten. Weitere Anwendungshinweise findest du in der Application Note AN2606.
GCC Optionen
Achtung: Keil MDK verwendet einen anderen Compiler, für den dieses Kapitel nicht passt.Newlib
Der arm-gcc Compiler bringt standardmäßig zwei C Bibliotheken mit: Newlib ist die Standard-Bibliothek von Linux, während die newlib-nano von ARM für deren 32 Bit Mikrocontroller optimiert wurde. Du kannst eine Menge Speicherplatz sparen, indem du auf die kleinere Version der Library wechselst. Dazu dient das Linker-Flag -specs=nano.specs.
Wenn das Programm die stdio.h Library benutzt, muss man entweder einige Funktionen zum Zugriff auf die Konsole implementieren oder mittels Linker-Flag -specs=nosys.specs auf Dummy Funktionen zurückgreifen.
Wenn man Fließkommazahlen ausgeben möchte, muss man bei der newlib-nano zusätzlich die Option -u _printf_float angeben. Das kostet zusätzlich rund 9 kB Flash Speicher. Für das Parsen von Fließkommazahlen benötigt man die Option -u _scanf_float. Außerdem muss man die FPU einschalten.
Ich habe gemessen, wie viel Speicher die Funktionen puts() und printf() von der newlib-nano ohne Fließkomma-Unterstützung benötigen:
| Funktion | Heap | Stack | Code (Flash) |
|---|---|---|---|
| puts() | 1468 | 16 | 2532 Bytes |
| printf() | 1468 | 16 | 4020 Bytes |
Das ist erheblich mehr, als bei AVR Mikrocontrollern. Der Speicherbedarf von printf() ist unabhängig von der Anzahl der Argumente und Formatier-Optionen. Wenn weniger als 1468 Bytes Heap zur Verfügung stehen, belegt die Library stattdessen nur 436 Bytes und gibt dann jedes Zeichen einzeln mit _write() aus. Wenn weniger als 436 Bytes Heap zur Verfügung stehen, dann brechen die Funktionen mit einer HardFault Exception ab.
Da Mikrocontroller im Gegensatz zu größeren Computern kein Standard Ausgabegerät (wie Bildschirm oder Terminal) haben, muss man die Funktion _write() selber implementieren. Erst danch funktionieren printf(), puts() und putchar():
int _write(int file, char *ptr, int len)
{
for (int i=0; i<len; i++)
{
char c=*ptr++;
// hier das Zeichen c irgendwo ausgeben
}
return len;
}
Weiter unten findest du konkrete Beispiele für Ausgaben über serielle Ports und USB. Bei der Ausgabe von Text mit printf() und putchar() ist zu beachten, dass die Zeichen in einem Puffer gesammelt werden, bis dieser entweder voll ist oder ein Zeilenvorschub (\n) erfolgt. Mit fflush(stdout) kann man erzwingen, dass die Ausgabe sofort erfolgt. puts() ist nicht betroffen, weil es immer einen Zeilenvorschub anhängt.
Assembler Listing
Wenn du sehen willst, welchen Assembler-Code der Compiler erzeugt, benutze die Compiler-Optionen
-g -Wa,-adhlns="$(@:%.o=%.lst)"
Du findest dann für jede Quell-Datei eine *.lst Datei im Verzeichnis Debug oder Release.
Optimierungen
In den Einstellungen des Compilers kann man beeinflussen, mit welcher Strategie der Compiler das Programm optimiert (umstrukturiert).
| Option | Beschreibung |
|---|---|
| -O0 | Keine Optimierung. Der Assembler Code entspricht genau dem C-Code. Aber das Programm läuft viel Langsamer, als mit Optimierung. |
| -Og | Das Programm wird ein bisschen optimiert, ohne den Debugger zu beeinträchtigen. |
| -O1 | Nur einfache Optimierungen, der Assembler-Code entspricht strukturell weitgehend dem Quelltext. |
| -Os | Gute Geschwindigkeit bei möglichst geringer Code-Größe. |
| -O2 | Gute Geschwindigkeit. |
| -O3 | Beste Geschwindigkeit, unter Umständen wird der Code aber viel größer. |
Optimierter Code stimmt stellenweise nicht mehr mit dem C-Quelltext überein, was die Benutzung des Debuggers beeinträchtigt. Zum Beispiel kann der Debugger nur Variablen anzeigen, die eine Adresse im RAM haben, aber der optimierende Compiler bevorzugt CPU Register. Der Compiler ersetzt manchmal ganze Prozeduren durch inline Code, und Schleifen durch völlig anderen Code, der das gleiche Ergebnis produziert.
Damit der Debugger funktioniert, braucht man die Option -g. Sie veranlasst den Compiler dazu, Informationen für den Debugger in die *.elf Datei zu schreiben. Auf die Geschwindigkeit und Größe im Flash hat -g keinen Einfluss.
Ich bevorzuge -O1 -g, da der so erzeugte Code nur marginal langsamer ist, als in den höheren Stufen. Der Code lässt sich dennoch weitgehend debuggen und die Assembler Listings sind überschaubar. Weniger gut finde ich die Vorgabe der IDE, wo zwischen Debug- und Release-Modus unterschieden wird. Es geht dabei nicht nur darum dem Compiler zu vertrauen, sondern dass feine Unterschiede im Timing manchmal erhebliche Probleme (Race Conditions) auslösen, die man gerne möglichst früh bemerken will. Ich möchte nicht wochenlang eine Debug-Version des Programm testen, um am Ende eine andere Release-Version abzuliefern.
Die vollständige Liste der Optimierungen befindet sich hier.
Startup-Code
Im Gegensatz zu allen mir bekannten Compilern für 8bit Mikrocontroller befindet sich der Startup-Code und die Interrupt-Vektor Tabelle in editierbaren Dateien (sysmem.c und startup_stm32.s). Der Projekt-Assistent in der IDE legt diese Dateien automatisch an. Für erste Versuche kann man sie unverändert benutzen.
Falls vorhanden, führt der Startup-Code eine Funktion mit folgender Signatur aus, bevor statische Objekte konstruiert werden und bevor main() ausgeführt wird:
void SystemInit()
{
...
}
Bei großen C++ Projekten kann es sich lohnen, die Erhöhung der Taktfrequenz dort unterzubringen, denn dann startet das Programm schneller. Dies ist auch ein guter Platz, um die FPU einzuschalten.
Speicher-Struktur
Obwohl der Prozessor in Harvard Architektur gestaltet ist, benutzt er einen gemeinsamen Adress-Raum für Programm, Daten und I/O Register. Dadurch können alle I/O Register über Zeiger angesprochen werden und der Prozessor kann Code sowohl aus dem RAM als auch aus dem (Flash-) ROM ausführen. Adressen und Zeiger sind 32bit groß.
Die Befehle sind teilweise 16bit und teilweise 32bit groß.
Daten werden als 8, 16 oder 32bit geladen. Sie müssen nicht zwingend an der 32bit Wortgröße ausgerichtet sein. Aber man erreicht bessere Geschwindigkeit, wenn 16bit Daten an 16bit Adressen und 32bit Daten an 32bit Adressen ausgerichtet sind. Der Compiler kümmert sich automatisch darum.
Die Register für I/O Funktionen sind überwiegend 32bit breit.
Schreibzugriffe auf die Register finden asynchron statt. So kann die CPU zum Beispiel z.B. ein langsames Register am APB1 Bus beschreiben und noch bevor dies fertig ist ein anderes Register am AHB oder APB2 Bus ansprechen. Mit dem Befehl __DSB() zwischen zwei Register-Zugriffen stellt man sicher, dass sie ohne Überlappung nacheinander stattfinden.
Im Gegensatz zum avr-gcc belegt der arm-gcc für konstante Zeichenketten kein RAM. Zugriffe auf Flash erfordern keine speziellen Befehle, sind jedoch bei Taktfrequenzen oberhalb von 24 MHz etwas langsamer als Zugriffe auf RAM.
Funktionsaufrufe
Bei Funktionsaufrufen werden bis zu 4 Parameter durch Register übergeben. Dabei ist es vorteilhaft, sie als 32bit Typ zu deklarieren, um Konvertierungen zu vermeiden. Bei mehr als 4 Parametern wird das RAM zur Übergabe benutzt, dann sind 8bit, 16bit und 32bit Typen gleich langsam.
Der Rückgabewert einer Funktion wird ebenfalls in einem Register übermittelt und sollte daher 32bit groß sein, falls Geschwindigkeit wichtig ist.
Stack
Der Stapel speichert ausschließlich 32bit Werte. Bei jedem PUSH wird der Stapelzeiger (SP) zuerst um 4 verringert und dann wird das Wort an diese Adresse abgelegt. Der Stapelzeiger zeigt also immer auf die zuletzt belegte Adresse im RAM.
Es gibt zwei Stapelzeiger MSP und PSP, zwischen denen man umschalten kann. Der Prozessor startet mit dem MSP, welcher durch das erste Wort in der Interrupt-Vektor Tabelle (an Adresse 0) initialisiert wird. Der alternative Stapelzeiger PSP wird von Betriebssystemen genutzt, um den Programmen separate Stapel zuzuweisen. Unter dem Namen SP spricht man immer den Stapelzeiger an, der durch das SPEL Bit im CONTROL Register ausgewählt wurde (0=MSP (default), 1=PSP).
Relevante CMSIS Funktionen:
- __get_MSP()
- __set_MSP(addr)
- __get_PSP()
- __set_PSP(addr)
- __get_CONTROL()
- __set_CONTROL(value)
Interrupt-Vektoren
Der Flash-Speicher beginnt immer mit der Exception- und Interrupt-Vektor Liste. Jeder Eintrag in der Liste ist eine 32bit Sprungadresse. Diese ist im Referenzhandbuch Kapitel "Interrupt and exception vectors" dokumentiert.
Der Quelltext dazu befindet sich in der Datei startup/startup_stm32.s. Dort findest du die vorgegebenen Namen der C-Funktionen. Die folgende Tabelle gilt für alle STM32F3 Modelle:
| Address | ARM Exception Nr. | CMSIS Interrupt Nr. | ISR Handler Function | Description |
|---|---|---|---|---|
| ARM Processor Exceptions | ||||
| 0x0000 | Initial value for the stack pointer MSP. | |||
| 0x0004 | Reset_Handler | Initial value for the program counter, points to assembler startup code. | ||
| 0x0008 | 2 | -14 | NMI_Handler() | Non maskable interrupt. The RCC Clock Security System (CSS) is linked to the NMI vector. |
| 0x000C | 3 | -13 | HardFault_Handler() | Hardware fault. Can optionally be splitted in the next 3 entries: |
| 0x0010 | 4 | -12 | MemManage_Handler() | Memory protection fault |
| 0x0014 | 5 | -11 | BusFault_Handler() | Pre-fetch or memory access fault |
| 0x0018 | 6 | -10 | UsageFault_Handler() | Undefined instruction, illegal unaligned access, invalid state, division by zero |
| 0x001C | 7 | -9 | reserved | |
| 0x0020 | 8 | -8 | ||
| 0x0024 | 9 | -7 | ||
| 0x0028 | 10 | -6 | ||
| 0x002C | 11 | -5 | SVC_Handler() | Supervisor Call, triggered by the SVC command (formerly known as SVI). Can be used to call operating system services. |
| 0x0030 | 12 | -4 | reserved | |
| 0x0034 | 13 | -3 | ||
| 0x0038 | 14 | -2 | PendSV_Handler() | Pendable Request for System Service. Triggered by the operating system by writing to the ICSR register, to switch the context. |
| 0x003C | 15 | -1 | SysTick_Handler() | Called when the systick timer reaches 0 |
| STM32 Hardware Interrupts | ||||
| 0x0040 | 0 | WWDG_IRQHandler() | Window Watchdog | |
| 0x0044 | 1 | PVD_IRQHandler() | PVD through EXTI Line detection | |
| 0x0048 | 2 | TAMP_STAMP_IRQHandler() | Tamper and TimeStamp through EXTI Line 19 | |
| 0x004C | 3 | RTC_WKUP_IRQHandler() | RTC wakeup timer through EXTI Line 20 | |
| 0x0050 | 4 | FLASH_IRQHandler() | Flash | |
| 0x0054 | 5 | RCC_IRQHandler() | RCC | |
| 0x0058 | 6 | EXTI0_IRQHandler() | EXTI Line 0 | |
| 0x005C | 7 | EXTI1_IRQHandler() | EXTI Line 1 | |
| 0x0060 | 8 | EXTI2_TSC_IRQHandler() | EXTI Line 2 and Touch sensing | |
| 0x0064 | 9 | EXTI3_IRQHandler() | EXTI Line 3 | |
| 0x0068 | 10 | EXTI4_IRQHandler() | EXTI Line 4 | |
| 0x006C | 11 | DMA1_CH1_IRQHandler() | DMA1 channel 1 | |
| 0x0070 | 12 | DMA1_CH2_IRQHandler() | DMA1 channel 2 | |
| 0x0074 | 13 | DMA1_CH3_IRQHandler() | DMA1 channel 3 | |
| 0x0078 | 14 | DMA1_CH4_IRQHandler() | DMA1 channel 4 | |
| 0x007C | 15 | DMA1_CH5_IRQHandler() | DMA1 channel 5 | |
| 0x0080 | 16 | DMA1_CH6_IRQHandler() | DMA1 channel 6 | |
| 0x0084 | 17 | DMA1_CH7_IRQHandler() | DMA1 channel 7 | |
| 0x0088 | 18 | ADC1_2_IRQHandler() | ADC1 and ADC2 | |
| 0x008C | 19 | USB_HP_CAN_TX_IRQHandler() | USB High Priority/CAN_TX | |
| 0x0090 | 20 | USB_LP_CAN_RX0_IRQHandler() | USB Low Priority/CAN_RX0 | |
| 0x0094 | 21 | CAN_RX1_IRQHandler() | CAN_RX1 | |
| 0x0098 | 22 | CAN_SCE_IRQHandler() | CAN_SCE | |
| 0x009C | 23 | EXTI9_5_IRQHandler() | EXTI Line[9:5] | |
| 0x00A0 | 24 | TIM1_BRK_TIM15_IRQHandler() | TIM1 Break/TIM15 | |
| 0x00A4 | 25 | TIM1_UP_TIM16_IRQHandler() | TIM1 Update/TIM16 | |
| 0x00A8 | 26 | TIM1_TRG_COM_TIM17_IRQHandler() | TIM1 trigger and commutation/TIM17 | |
| 0x00AC | 27 | TIM1_CC_IRQHandler() | TIM1 capture compare | |
| 0x00B0 | 28 | TIM2_IRQHandler() | TIM2 | |
| 0x00B4 | 29 | TIM3_IRQHandler() | TIM3 | |
| 0x00B8 | 30 | TIM4_IRQHandler() | TIM4 | |
| 0x00BC | 31 | I2C1_EV_EXTI23_IRQHandler() | I2C1 event and EXTI Line 23 | |
| 0x00C0 | 32 | I2C1_ER_IRQHandler() | I2C1 error | |
| 0x00C4 | 33 | I2C2_EV_EXTI24_IRQHandler() | I2C2 event and EXTI Line 24 | |
| 0x00C8 | 34 | I2C2_ER_IRQHandler() | I2C2 error | |
| 0x00CC | 35 | SPI1_IRQHandler() | SPI1 | |
| 0x00D0 | 36 | SPI2_IRQHandler() | SPI2 | |
| 0x00D4 | 37 | USART1_EXTI25_IRQHandler() | USART1 and EXTI Line 25 | |
| 0x00D8 | 38 | USART2_EXTI26_IRQHandler() | USART2 and EXTI Line 26 | |
| 0x00DC | 29 | USART3_EXTI28_IRQHandler() | USART3 and EXTI Line 28 | |
| 0x00E0 | 40 | EXTI15_10_IRQHandler() | EXTI Line[15:10] | |
| 0x00E4 | 41 | RTCAlarm_IRQHandler() | RTC alarm | |
| 0x00E8 | 42 | USB_WKUP_IRQHandler() | USB wakeup from Suspend through EXTI line 18 | |
| 0x00EC | 43 | TIM8_BRK_IRQHandler() | TIM8 break | |
| 0x00F0 | 44 | TIM8_UP_IRQHandler() | TIM8 update | |
| 0x00F4 | 45 | TIM8_TRG_COM_IRQHandler() | TIM8 Trigger and commutation | |
| 0x00F8 | 46 | TIM8_CC_IRQHandler() | TIM8 capture compare | |
| 0x00FC | 47 | ADC3_IRQHandler() | ADC3 | |
| 0x0100 | 48 | FMC_IRQHandler() | FMC | |
| 0x0104 | 49 | reserved | ||
| 0x0108 | 50 | |||
| 0x010C | 51 | SPI3_IRQHandler() | SPI3 | |
| 0x0110 | 52 | UART4_EXTI34_IRQHandler() | UART4 and EXTI Line 34 | |
| 0x0114 | 53 | UART5_EXTI35_IRQHandler() | UART5 and EXTI Line 35 | |
| 0x0118 | 54 | TIM6_DACUNDER_IRQHandler() | TIM6 and DAC1 underrun | |
| 0x011C | 55 | TIM7_IRQHandler() | TIM7 | |
| 0x0120 | 56 | DMA2_CH1_IRQHandler() | DMA2 channel1 | |
| 0x0124 | 57 | DMA2_CH2_IRQHandler() | DMA2 channel2 | |
| 0x0128 | 58 | DMA2_CH3_IRQHandler() | DMA2 channel3 | |
| 0x012C | 59 | DMA2_CH4_IRQHandler() | DMA2 channel4 | |
| 0x0130 | 60 | DMA2_CH5_IRQHandler() | DMA2 channel5 | |
| 0x0134 | 61 | ADC4_IRQHandler() | ADC4 | |
| 0x0138 | 62 | reserved | ||
| 0x013C | 63 | |||
| 0x0140 | 64 | COMP123_IRQHandler() | COMP1, COMP2 and COMP3 combined with EXTI Lines 21, 22 and 29 | |
| 0x0144 | 65 | COMP456_IRQHandler() | COMP4, COMP5 and COMP6 combined with EXTI Lines 30, 31 and 32 | |
| 0x0148 | 66 | COMP7_IRQHandler() | COMP7 combined with EXTI Line 33 | |
| 0x014C | 67 | reserved | ||
| 0x0150 | 68 | |||
| 0x0154 | 69 | |||
| 0x0158 | 70 | |||
| 0x015C | 71 | |||
| 0x0160 | 72 | I2C3_EV_IRQHandler() | I2C3 Event | |
| 0x0164 | 73 | I2C3_ER_IRQHandler() | I2C3 Error | |
| 0x0168 | 74 | USB_HP_IRQHandler() | alternative USB High priority (see SYSCGFG->CFGR1 Bit 5 USB_IT_RMP) | |
| 0x016C | 75 | USB_LP_IRQHandler() | alternative USB Low priority (see SYSCGFG->CFGR1 Bit 5 USB_IT_RMP) | |
| 0x0170 | 76 | USB_WKUP_EXTI_IRQHandler() | alternative USB wake up from Suspend through EXTI line 18 (see SYSCGFG->CFGR1 Bit 5 USB_IT_RMP) | |
| 0x0174 | 77 | TIM20_BRK_IRQHandler() | TIM20 Break | |
| 0x0178 | 78 | TIM20_UP_IRQHandler() | TIM20 Upgrade | |
| 0x017C | 79 | TIM20_TRG_COM_IRQHandler() | TIM20 Trigger and Commutation | |
| 0x0180 | 80 | TIM20_CC_IRQHandler() | TIM20 Capture Compare | |
| 0x0184 | 81 | FPU_IRQHandler() | Floating point | |
| 0x0188 | 82 | reserved | ||
| 0x018C | 83 | |||
| 0x0190 | 84 | SPI4_IRQHandler() | SPI4 SPI4 Global | |
Bei STM32F334 gilt jedoch abweichend:
| Address | ARM Exception Nr. | CMSIS Interrupt Nr. | ISR Handler Function | Description |
|---|---|---|---|---|
| 0x0118 | 54 | TIM6_DAC1_IRQHandler() | TIM6 global and DAC1 underrun | |
| 0x011C | 55 | TIM7_DAC2_IRQHandler() | TIM7 global and DAC2 underrun | |
| 0x0140 | 64 | COMP2_IRQHandler() | COMP2 combined with EXTI Line 22 | |
| 0x0144 | 65 | COMP4_6_IRQHandler() | COMP4 and COMP6 combined with EXTI Lines 30 and 32 | |
| 0x014C | 67 | HRTIM_Master_IRQHandler() | HRTIM master timer | |
| 0x0150 | 68 | HRTIM_TIMA_IRQHandler() | HRTIM timer A | |
| 0x0154 | 69 | HRTIM_TIMB_IRQHandler() | HRTIM timer B | |
| 0x0158 | 70 | HRTIM_TIMC_IRQHandler() | HRTIM timer C | |
| 0x015C | 71 | HRTIM_TIMD_IRQHandler() | HRTIM timer D | |
| 0x0160 | 72 | HRTIM_TIME_IRQHandler() | HRTIM timer E | |
| 0x0164 | 73 | HRTIM_TIM_FLT_IRQHandler() | HRTIM fault |
Über das SCB->VTOR Register kann man den Ort der Liste verändern um sie z.B. ins RAM zu verschieben.
Interrupt Controller
Der Interrupt-Controller NVIC steuert die Verarbeitung von Unterbrechungs-Signalen. Er ist Bestandteil des ARM Kerns.
Solche Signale werden von interner oder externer Hardware ausgelöst, wenn bestimmte Ereignisse auftreten. Sie können dazu genutzt werden, das laufende Programm vorübergehend zu unterbrechen und stattdessen eine besondere Funktion auszuführen, die Interrupt-Handler oder Interrupt-Service-Routine (ISR) genannt wird.
Reset, NMI und HardFault haben immer die höchste Priorität, bei allen anderen kann man die Priorität einstellen. Interrupt-Handler können durch höher priorisierte Interrupts unterbrochen werden.
Die wichtigsten CMSIS Funktionen zur Konfiguration des Interrupt-Systems sind:
- NVIC_SetPriority(CMSIS Interrupt Nr, Priorität) Stelle die Priorität ein (0=höchste, 15=niedrigste)
- NVIC_EnableIRQ(CMSIS Interrupt Nr) Erlaube Hardware Interrupt
- NVIC_DisableIRQ(CMSIS Interrupt Nr) Sperre Hardware Interrupt
- NVIC_SetPendingIRQ(CMSIS Interrupt Nr) Löse einen Interrupt aus
- NVIC_SystemReset() Löse einen System Reset aus
- __disable_irq() Sperre alle Interrupts
- __enable_irq() Hebe die Interrupt-Sperre auf
- __set_PRIMASK(1) Sperre normale Interrupts (ausgenommen: NMI und HardFault)
- __get_PRIMASK() Lese die aktuelle Prioritäten-Maske aus
Um Unterbrechungen temporär zu verbieten (zum Beispiel für exklusiven Zugriff auf Daten oder Schnittstellen), wird folgende Vorgehensweise empfohlen:
uint32_t backup = __get_PRIMASK(); __set_PRIMASK(1); ... do some work ... __set_PRIMASK(backup);
Normale Unterbrechungen sind durch Pegel gesteuert. Wenn das Signal auf High steht, wird der zugeordnete Handler möglichst bald ausgeführt. Während der Interrupt-Handler läuft, muss das Signal wieder auf Low zurück zurück gehen, sonst wird der Interrupt-Handler nach seinem Ende gleich wieder aufgerufen.
Wenn das Signal zu früh verschwindet, während der Interrupt-Controller nach einer Gelegenheit sucht, den Interrupt-Handler auszuführen, geht es verloren. Der Interrupt-Handler wird dann nicht ausgeführt.
Extended Interrupts
Die externen Interrupt-Signale und auch einige interne durchlaufen einen erweiterten Schaltkreis, der zusätzliche Konfiguration erfordert. Man erkennt sie am Stichwort EXTI.
Die Kanäle EXTI0 bis EXT15 sind für I/O-Pins reserviert. Jeden Kanal kann man in den Registern AFIO->EXTICR[0-3] genau einem Port zuweisen. Wenn man zum Beispiel Kanal 0 dem Port A zuweist (also PA0), kann man auf den anderen Ports das Bit 0 nicht mehr für Interrupts verwenden. Diese Einschränkung gilt für alle 16 Kanäle.
Interrupt Flanken
Viele erweiterte Unterbrechungen werden durch Flanken (Signalwechsel) ausgelöst. Man erkennt sie an den Bits im Register EXTI->RTSR oder EXTI->FTSR.
- Steigende Flanke: Wenn man im Register EXTI->RTSR (bzw. EXTI->RTSR2) ein Bit setzt, dann startet die Interruptroutine beim Signalwechsel von Low nach High.
- Fallende Flanke: Wenn man im Register EXTI->FTSR (bzw. EXTI->FTSR2) ein Bit setzt, dann startet die Interruptroutine beim Signalwechsel von High nach Low.
Durch die Verwendung von Flanken ist automatisch sicher gestellt, dass der Handler nicht immer wieder erneut ausgeführt wird, falls ein Interrupt Signal für längere Zeit ansteht.
Flanken gesteuerte Interrupts gehen nicht verloren, wenn das Signal schon wieder verschwindet bevor der Handler aufgerufen wurde. Der Interrupt-Controller merkt sich, dass da mal eine Anforderung vorlag, die noch nicht abgearbeitet wurde.
In diesem Zusammenhang ist das Register EXTI->PR (bzw. EXTI->PR2) wichtig. Dort merkt sich der Interrupt-Controller den Zustand. Während der Initialisierung muss man das Bit zurück setzen, um sicher zu stellen, dass die erste Flanke zuverlässig erkannt wird. Man schreibt eine 1 in das jeweilige Bit, damit es auf 0 zurück gesetzt wird. Innerhalb der ISR muss man das Flag ebenfalls zurück setzen, am Besten ganz am Anfang. Am Ende der ISR wäre zu spät, da dieses Signal etwas verzögert verarbeitet wird.
Interrupt Masken
Im Register EXTI->IMR (bzw. EXTI->IMR2) werden Unterbrechungen maskiert. Man muss hier eine 1 in das jeweilige Bit schreiben, damit eine Interrupt-Leitung wirksam wird. Standardmäßig sind die meisten Interrupts maskiert, sind also ohne Wirkung.
Das folgende Beispiel löst einen Interrupt aus, wenn das Signal an PC13 von Low nach High wechselt. Beim Nucleo-Board ist PC13 mit dem blauen Taster verbunden.
#include <stdio.h>
#include "stm32f3xx.h"
// Output a trace message
void ITM_SendString(char *ptr)
{
while (*ptr)
{
ITM_SendChar(*ptr);
ptr++;
}
}
void EXTI15_10_IRQHandler()
{
// Clear pending interrupt flag
// It is important that this is not the last command in the ISR
SET_BIT(EXTI->PR, EXTI_PR_PR13);
// Output a trace message
ITM_SendString("irq\n");
}
int main()
{
// Enable clock of I/O features
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOCEN);
SET_BIT(RCC->APB2ENR, RCC_APB2ENR_SYSCFGEN);
// Assign EXTI13 to PC13 with rising edge
MODIFY_REG(SYSCFG->EXTICR[3], SYSCFG_EXTICR4_EXTI13, SYSCFG_EXTICR4_EXTI13_PC);
SET_BIT(EXTI->IMR, EXTI_IMR_MR13);
SET_BIT(EXTI->RTSR, EXTI_RTSR_TR13);
// Enable the interrupt handler call
NVIC_EnableIRQ(EXTI15_10_IRQn);
// Clear pending interrupt flag
SET_BIT(EXTI->PR, EXTI_PR_PR13);
// Endless loop
while (1) {}
}
Event Masken
Neben den Unterbrechungen steuert der NVIC auch Ereignisse. Ereignisse verwendet man üblicherweise, um die CPU aus aus einem Wait- oder Sleep- Zustand aufzuwecken. So hält zum Beispiel der Befehl __WFE() die CPU bis zum nächsten Ereignis an. Siehe Absatz Powermanagement.
Standardmäßig sind alle Ereignisse maskiert. Man muss im Register EXTI->EMR (bzw. EXTI->EMR2) das entsprechende Bit auf 1 setzen, um ein EXTI Signal als Ereignis zu behandeln.
Taktgeber
Ich habe ziemlich oft gelesen, dass das komplexe System zur Takterzeugung für Anfänger ein großes Hindernis sei. Das sehe ich anders, denn nach einem Reset wird der Mikrocontroller automatisch mit seinem internen 8 MHz R/C Oszillator getaktet. Damit kann man schon eine Menge sinnvoller Programme schreiben.
Die Taktsignale für den ARM Kern (dazu gehört auch der SysTick Timer), sowie RAM und Flash sind automatisch aktiviert. Alle anderen Komponenten muss man ggf. selbst einschalten, was ganz einfach durch Setzen von Bits in den Registern RCC->APB1ENR, RCC->APB2ENR und RCC->AHBENR erledigt wird.
Jetzt kommt der komplizierte Teil. Der System-Takt (SYSCLK) kann aus folgenden Quellen bezogen werden:
- HSE Externe Quelle mit 1-32 MHz oder Oszillator für Quarz oder Keramik Resonator mit 4-32 MHz
- HSI Interner 8 MHz R/C Oszillator, auf 1% kalibriert (bei 3,3 V und 25 °C)
Für Watchog und Echtzeit-Uhr (RTC) sind weitere Quellen vorgesehen:
- LSE Ist ein guter 32 kHz Quarz-Oszillator für die Echtzeituhr
- LSI Ist ein interner R/C Oszillator mit ca. 40 kHz für den Watchdog, nicht kalibriert
Mehrere Vorteiler und ein PLL Multiplikator können kombiniert werden, um unterschiedliche Taktfrequenzen zu erreichen. Am besten schaut man sich das mal in Cube MX an. Dort kann man schön sehen, welche Parameter konfigurierbar sind und wie sie zusammen wirken.
Das folgende Bild zeigt die Standardvorgabe vom STM32F303x6 und x8 nach einem Reset:

Das folgende Bild zeigt die Standardvorgabe vom STM32F303xB und xC nach einem Reset:

Das folgende Bild zeigt die Standardvorgabe vom STM32F303xD und xE nach einem Reset:

Achtung:
- Wenn die PLL bereits aktiv ist, muss man sie vor dem Umkonfigurieren zuerst deaktivieren.
- PLLMUL kann bei den Modellen STM32F100 bis 103 auf 2 bis 16 gestellt werden, aber bei den Modellen STM32F105 und STM32F107 nur auf 4 bis 9.
- Bei mehr als 24 MHz Systemtakt, muss man für den Flash Speicher 1 Wait-State einstellen.
- Bei mehr als 36 MHz ist außerdem ein Vorteiler für den internen APB1 Bus (auch low-speed I/O genannt) einzustellen.
- Bei mehr als 48 MHz Systemtakt, muss man für den Flash Speicher 2 Wait-States einstellen.
- Wenn man den APB1 oder APB2 Prescaler auf einen Teilerfaktor größer als /1 einstellt, dann wird die Taktfrequenz für die Timer nochmal verdoppelt.
Beispiel für den STM32F303xD und xE, 64 MHz mit dem internen HSI Oszillator:
// The current clock frequency
uint32_t SystemCoreClock=8000000;
// Change system clock to 64 MHz using internal 8 MHz R/C oscillator
void init_clock()
{
// Because the debugger switches PLL on, we may need to switch
// back to the HSI oscillator before we can configure the PLL
// Enable HSI oscillator
SET_BIT(RCC->CR, RCC_CR_HSION);
// Wait until HSI oscillator is ready
while(!READ_BIT(RCC->CR, RCC_CR_HSIRDY)) {}
// Switch to HSI oscillator
MODIFY_REG(RCC->CFGR, RCC_CFGR_SW, RCC_CFGR_SW_HSI);
// Wait until the switch is done
while ((RCC->CFGR & RCC_CFGR_SWS_Msk) != RCC_CFGR_SWS_HSI) {}
// Disable the PLL
CLEAR_BIT(RCC->CR, RCC_CR_PLLON);
// Wait until PLL is fully stopped
while(READ_BIT(RCC->CR, RCC_CR_PLLRDY)) {}
// Flash latency 2 wait states
MODIFY_REG(FLASH->ACR, FLASH_ACR_LATENCY, 2 << FLASH_ACR_LATENCY_Pos);
// 64 MHz using the 8 MHz/2 HSI oscillator with 16x PLL, lowspeed I/O runs at 32 MHz
WRITE_REG(RCC->CFGR, RCC_CFGR_PLLMUL16 + RCC_CFGR_PPRE1_DIV2);
// Enable PLL
SET_BIT(RCC->CR, RCC_CR_PLLON);
// Wait until PLL is ready
while(!READ_BIT(RCC->CR, RCC_CR_PLLRDY)) {}
// Select PLL as clock source
MODIFY_REG(RCC->CFGR, RCC_CFGR_SW, RCC_CFGR_SW_PLL);
// Update variable
SystemCoreClock=64000000;
}
Durch die Angabe __attribute__((section(".data"))) könnte man Funktionen etwas schneller ohne Waitstate aus dem RAM ausführen, da dieser ohne Waitstates arbeitet.
Beispiel für den STM32F303xD und xE, 72 MHz mit einem 8 MHz Quarz (HSE Oszillator):
// The current clock frequency
uint32_t SystemCoreClock=8000000;
// Change system clock to 72 MHz using 8 MHz crystal
void init_clock()
{
// Because the debugger switches PLL on, we may need to switch
// back to the HSI oscillator before we can configure the PLL
// Enable HSI oscillator
SET_BIT(RCC->CR, RCC_CR_HSION);
// Wait until HSI oscillator is ready
while(!READ_BIT(RCC->CR, RCC_CR_HSIRDY)) {}
// Switch to HSI oscillator
MODIFY_REG(RCC->CFGR, RCC_CFGR_SW, RCC_CFGR_SW_HSI);
// Wait until the switch is done
while ((RCC->CFGR & RCC_CFGR_SWS_Msk) != RCC_CFGR_SWS_HSI) {}
// Disable the PLL
CLEAR_BIT(RCC->CR, RCC_CR_PLLON);
// Wait until PLL is fully stopped
while(READ_BIT(RCC->CR, RCC_CR_PLLRDY)) {}
// Flash latency 2 wait states
MODIFY_REG(FLASH->ACR, FLASH_ACR_LATENCY, 2 << FLASH_ACR_LATENCY_Pos);
// Enable HSE oscillator
SET_BIT(RCC->CR, RCC_CR_HSEON);
// Wait until HSE oscillator is ready
while(!READ_BIT(RCC->CR, RCC_CR_HSERDY)) {}
// 72 MHz using the 8 MHz HSE oscillator with 9x PLL, lowspeed I/O runs at 36 MHz
WRITE_REG(RCC->CFGR, RCC_CFGR_SWS_HSE + RCC_CFGR_PLLSRC_HSE_PREDIV + RCC_CFGR_PLLMUL9 + RCC_CFGR_PPRE1_DIV2);
// Enable PLL
SET_BIT(RCC->CR, RCC_CR_PLLON);
// Wait until PLL is ready
while(!READ_BIT(RCC->CR, RCC_CR_PLLRDY)) {}
// Select PLL as clock source
MODIFY_REG(RCC->CFGR, RCC_CFGR_SW, RCC_CFGR_SW_PLL);
// Update variable
SystemCoreClock=72000000;
// Disable the HSI oscillator
CLEAR_BIT(RCC->CR, RCC_CR_HSION);
}
SysTick Timer
Alle Cortex-M Prozessoren enthalten einen 24bit Timer, mit dem man die Systemzeit misst. Der Timer zählt die Taktimpulse des Prozessors herunter und löst bei jedem Überlauf einen Interrupt aus. Der Funktionsaufruf SysTick_Config(SystemCoreClock/1000) sorgt dafür, dass jede Millisekunde ein SysTick Interrupt ausgelöst wird.
#include <stdint.h>
#include "stm32f3xx.h"
// The current clock frequency
uint32_t SystemCoreClock=8000000;
// Counts milliseconds
volatile uint32_t systick_count=0;
// Interrupt handler
void SysTick_Handler()
{
systick_count++;
}
// Delay some milliseconds.
// Note that effective time may be up to 1ms shorter than requested.
void delay_ms(int ms)
{
uint32_t start=systick_count;
while (systick_count-start<ms);
}
int main()
{
// Initialize the timer for 1 ms intervals
SysTick_Config(SystemCoreClock/1000);
// Delay 2 seconds
delay_ms(2000);
...
}
Wenn der Prozessor beim Debuggen angehalten wird, hält auch dieser Timer an. Im WFI und WFE Sleep Modus läuft der SysTick Timer weiter.
Digitale Pins
Generell können alle I/O Pins können erst benutzt werden, nachdem man ihre Taktversorgung im Register RCC->AHBENR eingeschaltet hat. Standardmäßig sind fast alle I/O Pins als digitaler Eingang konfiguriert. Um deren Status abzufragen, liest man das jeweilige GPIOx->IDR Register.
Im Register GPIOx->MODER konfiguriert man einen Pin als Ausgang oder für alternativen Funktionen (wie z.B. serieller Port oder PWM Timer). Wenn man einen I/O Pin für alternative Funktionen verwendet, muss man außerdem in GPIOx->AFR[0] oder GPIOx->AFR[1] einstellen, welche alternative Funktion das sein soll.
Direkte Schreibzugriffe sind über das Register GPIOx->ODR möglich. Um einzelne Pins atomar auf High oder Low zu schalten, verwendet man jedoch das GPIOx->BSRR Register.
Im Register GPIOx->OSPEEDR kann man die maximale Frequenz der Ausgänge auf 2, 10 oder 50 MHz einstellen. Damit beeinflusst man die Geschwindigkeit, mit der die Spannung von Low nach High (und zurück) wechselt. Der maximale Laststrom wird dadurch nicht verändert. Im Sinne von elektromagnetischer Verträglichkeit soll man hier immer den niedrigsten Wert einstellen, der zur Anwendung passt.
Im Register GPIOx->OTYPER kann man I/O Pins auf den Open-Drain Modus umkonfigurieren und im Register GPIOx->PUPDR kann man optional interne Pull-Up oder Pull-Down Widerstände einschalten.
Schaue Dir die Beschreibung der GPIO Register im Referenzhandbuch an. Die alternativen Funktionen der GPIO Pins sind im Datenblatt des Mikrocontrollers unter dem Stichwort "alternate functions" tabellarisch beschrieben.
Analoge Eingänge
Fast alle I/O Pins sind standardmäßig für digitale Eingabe konfiguriert. Für analoge Nutzung setzt man beide Bits im GPIOx->MODER Register:
// Configure PA1 as analog input for ADC1_IN2 MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER1, 0b11 << GPIO_MODER_MODER1_Pos);
Initialisierung des ADC1 für einzelne Lesezugriffe:
// Initialize the ADC1 for single conversion mode
void init_analog()
{
// Enable clock for ADC
SET_BIT(RCC->AHBENR, RCC_AHBENR_ADC12EN);
// Disable the ADC
if (READ_BIT(ADC1->ISR, ADC_ISR_ADRDY))
{
SET_BIT(ADC1->ISR, ADC_ISR_ADRDY);
}
if (READ_BIT(ADC1->CR, ADC_CR_ADEN))
{
SET_BIT(ADC1->CR, ADC_CR_ADDIS);
}
// Wait until ADC is disabled
while (READ_BIT(ADC1->CR, ADC_CR_ADEN));
// Enable ADC voltage regulator (this sequence is really necessary)
MODIFY_REG(ADC1->CR, ADC_CR_ADVREGEN, 0b00 << ADC_CR_ADVREGEN_Pos);
MODIFY_REG(ADC1->CR, ADC_CR_ADVREGEN, 0b01 << ADC_CR_ADVREGEN_Pos);
// Delay 1-2 ms
delay_ms(2);
// ADC Clock = HCLK/4
MODIFY_REG(ADC12_COMMON->CCR, ADC12_CCR_CKMODE, 0b11 << ADC12_CCR_CKMODE_Pos);
// Single ended mode for all channels
WRITE_REG(ADC1->DIFSEL,0);
// Start calibration for single ended mode
CLEAR_BIT(ADC1->CR, ADC_CR_ADCALDIF);
SET_BIT(ADC1->CR, ADC_CR_ADCAL);
// Wait until the calibration is finished
while (READ_BIT(ADC1->CR, ADC_CR_ADCAL));
// Clear the ready flag
SET_BIT(ADC1->ISR, ADC_ISR_ADRDY);
// Enable the ADC repeatedly until success (workaround from errata)
do
{
SET_BIT(ADC1->CR, ADC_CR_ADEN);
}
while (!READ_BIT(ADC1->ISR, ADC_ISR_ADRDY));
// Select software start trigger
MODIFY_REG(ADC1->CFGR, ADC_CFGR_EXTEN, 0b00 << ADC_CFGR_EXTEN_Pos);
// Select single conversion mode
CLEAR_BIT(ADC1->CFGR, ADC_CFGR_CONT);
// Set sample time to 32 cycles
MODIFY_REG(ADC1->SMPR1, ADC_SMPR1_SMP1, 0b100 << ADC_SMPR1_SMP1_Pos);
}
Lesen eines analogen Eingangs von ADC1:
// Read from an analog input of ADC1
uint32_t read_analog(uint32_t channel)
{
// Number of channels to convert: 1
MODIFY_REG(ADC1->SQR1, ADC_SQR1_L, 0 << ADC_SQR1_L_Pos); // ADC does one conversion more than configured here
// Select the channel
MODIFY_REG(ADC1->SQR1, ADC_SQR1_SQ1, channel << ADC_SQR1_SQ1_Pos);
// Clear the finish flag
CLEAR_BIT(ADC1->ISR, ADC_ISR_EOC);
// Start a conversion
SET_BIT(ADC1->CR, ADC_CR_ADSTART);
// Wait until the conversion is finished
while (!READ_BIT(ADC1->ISR, ADC_ISR_EOC));
while (READ_BIT(ADC1->CR, ADC_CR_ADSTART));
// Return the lower 12 bits of the result
return ADC1->DR & 0b111111111111;
}
Der ADC kann so konfiguriert werden, dass er mehrere Eingänge kontinuierlich liest. Mittels DMA können die Messergebnisse automatisch ins RAM übertragen werden. Dafür habe ich hier kein Beispiel parat.
PWM Ausgänge
Die Timer 1, 8 und 20 können jeweils 6 PWM Signale erzeugen. Damit kann man z.B. die Helligkeit von Lampen oder die Drehzahl von Motoren steuern. Die Timer 2, 3 und 4 haben jeweils vier PWM Kanäle. Die Timer 15, 16 und 17 haben jeweils 2 PWM Kanäle.
Der Timer 2 hat als einziger 32bit Auflösung für maximal 4294967295 Stufen, die anderen haben mit 16bit maximal 65535 Stufen.
Die Taktfrequenz der Timer wird normalerweise vom Systemtakt abgeleitet und kann durch den AHB Prescaler, den ABP2 Prescaler (beide im Register RCC->CFGR), sowie dem Timer Prescaler in TIMx->PSC reduziert werden. Bei einigen Timern kann man für höhere Taktfrequenzen die PLL im RCC->CFGR3 Register auswählen, was maximal 144 MHz ergibt. Der STM32F334 ist noch schneller, aber auf den gehe ich hier nicht weiter ein.
Der Timer zählt fortlaufend von 0 an hoch bis zum Maximum, welches durch das TIMx->ARR Register festgelegt wird. Wenn der Maximalwert als 32768 festgelegt wird, können die Ausgangsimpulse wahlweise 1 bis 32768 Takte breit sein.
Für jeden Ausgang gibt es ein Vergleichs-Register TIMx->CCRy welches bestimmt, wie breit die Ausgangsimpulse sein sollen. Beim Extremwert 0 ist der Ausgang ständig Low. Bei Werten größer dem Maximum (in TIMx->ARR) ist der Ausgang ständig High. Mit der option "inverse polarity" im Register TIMx->CCER können die Ausgänge umgepolt werden, so dass sie Low-Impule liefern.
Das folgende Beispielprogramm benutzt einen Ausgang von Timer 2 (PA5), um eine Leuchtdiode unterschiedlich hell flimmern zu lassen:
#include "stm32f3xx.h"
// delay loop for the default 8 MHz clock with optimizer enabled
void delay(uint32_t msec)
{
for (uint32_t j=0; j < msec * 2000; j++)
{
__NOP();
}
}
int main()
{
// Enable Port A
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN);
// PA5 = TIM2_CH1 alternate function 1 (see data sheet)
MODIFY_REG(GPIOA->AFR[0], GPIO_AFRL_AFRL5, 1 << GPIO_AFRL_AFRL5_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER5, 0b10 << GPIO_MODER_MODER5_Pos);
// Enable timer 2
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_TIM2EN);
// Timer 2 channel 1 compare mode = PWM1 with the required preload buffer enabled
MODIFY_REG(TIM2->CCMR1, TIM_CCMR1_OC1M, 0b110 << TIM_CCMR1_OC1M_Pos);
SET_BIT(TIM2->CCMR1, TIM_CCMR1_OC1PE);
// Timer 2 enable channel 1 output
SET_BIT(TIM2->CCER, TIM_CCER_CC1E);
// Timer 2 inverse polarity for channel 1
// SET_BIT(TIM2->CCER, TIM_CCER_CC1P);
// Timer 2 clock prescaler, the PCLK2 clock is divided by this value +1.
TIM2->PSC = 9; // divide clock by 10
// Timer 2 auto reload register, defines the maximum value of the counter in PWM mode.
TIM2->ARR = 32768; // 8000000/10/32768 = 27 pulses per second
// Timer 2 enable counter and auto-preload
SET_BIT(TIM2->CR1, TIM_CR1_CEN + TIM_CR1_ARPE);
// endless loop
while(1)
{
// Change the brightness of the LED (PA5) in 16 steps
for (int i=0; i<=15; i++)
{
// Timer 2 channel 1 set PWM pulse width
TIM2->CCR1 = (1<<i);
delay(500);
}
}
}
Ich habe hier absichtlich eine sehr niedrige PWM Frequenz gewählt, damit man das Flackern der LED sehen kann. In einer realen Anwendung würde man natürich eine höhere PWM Frequenz über 100 Hz wählen.
Die Timer 1, 8, 15, 16, 17 und 20 können komplementäre Ausgangssignale mit Tot-Zeit erzeugen, was für den Eigenbau von H-Brücken nützlich ist.
Ich möchte darauf hinweisen, dass die Timer noch viele weitere Funktionen haben, die ich hier gar nicht alle zeigen kann. Mehr Informationen dazu gibt es zum Beispiel in der Application Note AN4776.
USART Schnittstelle
Der interne HSI Oszillator ist häufig aber nicht immer stabil genug, um die USART Schnittstellen zu betreiben. Es empfiehlt sich daher, auf eine externe Quelle (HSE) umzuschalten. In den folgenden Beispielen nutze ich der Einfachheit halber trotzdem den internen HSI Oszillator.
Je nach Taktfrequenz der Peripherie sind unterschiedliche Baudraten möglich:
- Bei 8 MHz: 150 bis 500000 Baud
- Bei 32 MHz: 600 bis 2000000 Baud
- Bei 36 MHz: 1200 bis 2000000 Baud
- Bei 72 MHz: 2400 bis 4000000 Baud (nur USART1)
Die serielle Schnittstelle USART1 liegt auf PA9 (TxD) und PA10 (RxD). Das folgende Beispielprogramm sendet regemäßig "Hello" aus. Außerdem sendet es alle empfangenen Zeichen als Echo wieder zurück. Das Senden findet direkt statt (ggf. mit Warteschleife) während der Empfang interrupt-gesteuert stattfindet:
#include <stdio.h>
#include "stm32f3xx.h"
uint32_t SystemCoreClock=8000000;
// Delay loop for the default 8 MHz CPU clock with optimizer enabled
void delay(uint32_t msec)
{
for (uint32_t j=0; j < msec * 2000; j++)
{
__NOP();
}
}
// Redirect standard output to the serial port
int _write(int file, char *ptr, int len)
{
for (int i=0; i<len; i++)
{
while(!(USART1->ISR & USART_ISR_TXE));
USART1->TDR = *ptr++;
}
return len;
}
// Called after each received character
void USART1_EXTI25_IRQHandler()
{
// read the received character
char received=USART1->RDR;
// send echo back
while(!(USART1->ISR & USART_ISR_TXE));
USART1->TDR = received;
}
int main()
{
// Enable clock for Port A
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN);
// PA5 = Output for the LED
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER5, 0b01 << GPIO_MODER_MODER5_Pos);
// Use system clock for USART1
SET_BIT(RCC->APB2ENR, RCC_APB2ENR_USART1EN);
MODIFY_REG(RCC->CFGR3, RCC_CFGR3_USART1SW, 0b01 << RCC_CFGR3_USART1SW_Pos);
// PA9 (TxD) shall use the alternate function 7 (see data sheet)
MODIFY_REG(GPIOA->AFR[1], GPIO_AFRH_AFRH1, 7 << GPIO_AFRH_AFRH1_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER9, 0b10 << GPIO_MODER_MODER9_Pos);
// PA10 (RxD) shall use the alternate function 7 (see data sheet)
MODIFY_REG(GPIOA->AFR[1], GPIO_AFRH_AFRH2, 7 << GPIO_AFRH_AFRH2_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER10, 0b10 << GPIO_MODER_MODER10_Pos);
// Set baudrate
USART1->BRR = (SystemCoreClock / 9600);
// Enable transmitter, receiver and receive-interrupt of USART1
USART1->CR1 = USART_CR1_UE + USART_CR1_TE + USART_CR1_RE + USART_CR1_RXNEIE;
// Enable interrupt in NVIC
NVIC_EnableIRQ(USART1_IRQn);
while (1)
{
// LED on
WRITE_REG(GPIOA->BSRR, GPIO_BSRR_BS_5);
delay(500);
puts("Hello");
// LED off
WRITE_REG(GPIOA->BSRR, GPIO_BSRR_BR_5);
delay(500);
}
}
Jetzt kommt ein Beispiel für die zweite serielle Schnittstelle. Beim Nucleo-64 Board ist USART2 mit dem ST-Link Adapter verbunden, der diese wiederum über USB an einen virtuellen COM Port weiter leitet:
| ST-Link CN3 | STM32F1 USART2 | Beschreibung | |
|---|---|---|---|
| TxD | → | RxD (=PA3) | Daten |
| RxD | ← | TxD (=PA2) | Daten |
| GND | GND | Gemeinsame Masse |
Der ST-Link v2.1 unterstützt 600 bis 2000000 Baud.
#include <stdio.h>
#include "stm32f3xx.h"
uint32_t SystemCoreClock=8000000;
// Delay loop for the default 8 MHz CPU clock with optimizer enabled
void delay(uint32_t msec)
{
for (uint32_t j=0; j < msec * 2000; j++)
{
__NOP();
}
}
// Redirect standard output to the serial port
int _write(int file, char *ptr, int len)
{
for (int i=0; i<len; i++)
{
while(!(USART2->ISR & USART_ISR_TXE));
USART2->TDR = *ptr++;
}
return len;
}
// Called after each received character
void USART2_EXTI26_IRQHandler()
{
// read the received character
char received=USART2->RDR;
// send echo back
while(!(USART2->ISR & USART_ISR_TXE));
USART2->TDR = received;
}
int main()
{
// Enable clock for Port A
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN);
// PA5 = Output for the LED
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER5, 0b01 << GPIO_MODER_MODER5_Pos);
// Use system clock for USART2
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_USART2EN);
MODIFY_REG(RCC->CFGR3, RCC_CFGR3_USART2SW, 0b01 << RCC_CFGR3_USART2SW_Pos);
// PA2 (TxD) shall use the alternate function 7 (see data sheet)
MODIFY_REG(GPIOA->AFR[0], GPIO_AFRL_AFRL2, 7 << GPIO_AFRL_AFRL2_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER2, 0b10 << GPIO_MODER_MODER2_Pos);
// PA3 (RxD) shall use the alternate function 7 (see data sheet)
MODIFY_REG(GPIOA->AFR[0], GPIO_AFRL_AFRL3, 7 << GPIO_AFRL_AFRL3_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER3, 0b10 << GPIO_MODER_MODER3_Pos);
// Set baudrate, assuming that USART2 is clocked with
// the same frequency as the CPU core (no prescaler)
USART2->BRR = (SystemCoreClock / 9600);
// Enable transmitter, receiver and receive-interrupt of USART2
USART2->CR1 = USART_CR1_UE + USART_CR1_TE + USART_CR1_RE + USART_CR1_RXNEIE;
// Enable interrupt in NVIC
NVIC_EnableIRQ(USART2_IRQn);
while (1)
{
// LED an
WRITE_REG(GPIOA->BSRR, GPIO_BSRR_BS_5);
delay(500);
puts("Hello");
// LED aus
WRITE_REG(GPIOA->BSRR, GPIO_BSRR_BR_5);
delay(500);
}
}
I²C Bus
Der I²C Bus ist eine beliebte Schnittstelle für die Anbindung von Peripherie über kurze Leitungen, wie Port-Erweiterungen, Sensoren und Batterie-Management. Siehe Spezifikation von Philips/NXP.
Der Bus besteht aus den beiden Leitungen SDA und SCL. An beide Leitungen gehört jeweils ein Pull-Up Widerstand, typischerweise mit 4,7 kΩ bei 5 V oder 2,7 kΩ bei 3,3 V. Die STM32F3 Mikrocontroller haben bis zu drei I²C Busse, alle unterstützen 3,3 V und 5 V Pegel, aber nur wenige Slaves sind so flexibel.
Bevor man einen I²C Anschluss benutzen kann, muss man bei den betroffenen Pins (SDA und SCL) die alternative Funktion im GPIOx->AFR und GPIOx->MODER einstellen. Außerdem muss der Pin im GPIOx->OTYPER Register auf Open-Drain Modus eingestellt werden. Hier ist ein Beispiel für I²C2 auf einem STM32F303CC:
/**
* Initialize the I/O pins.
*/
init_io()
{
// Enable Port A
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN);
// I2C2 PA9=SCL, alternate function 4 open-drain
MODIFY_REG(GPIOA->AFR[1], GPIO_AFRH_AFRH1, 4 << GPIO_AFRH_AFRH1_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER9, 0b10 << GPIO_MODER_MODER9_Pos);
SET_BIT(GPIOA->OTYPER, GPIO_OTYPER_OT_9);
// I2C2 PA10=SDA, alternate function 4 open-drain
MODIFY_REG(GPIOA->AFR[1], GPIO_AFRH_AFRH2, 4 << GPIO_AFRH_AFRH2_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER10, 0b10 << GPIO_MODER_MODER10_Pos);
SET_BIT(GPIOA->OTYPER, GPIO_OTYPER_OT_10);
}
Normalerweise hat man einen zentralen Master, der viele Slaves ansteuert. Jeder Slave hat eine eigene eindeutige 7bit Adresse. Innerhalb einer Transaktion kann der Master 0 oder mehr Bytes an den Slave senden und danach 0 oder mehr Bytes vom Slave empfangen. Der folgende Code kann dazu für den Master verwendet werden:
/**
* Initialize the I²C interface for master mode.
*
* The I/O port mode and alternate function must be configured already.
* HSI must be on because it is used as clock source.
*
* @param registerStruct May be either I2C1, I2C2 or I2C3
* @param fastMode false=100 kHz, true=400 kHz
*/
void i2c_init(I2C_TypeDef* registerStruct, bool fastMode)
{
// Enable clock for the I2C interface
#ifdef I2C1
if (registerStruct==I2C1)
{
CLEAR_BIT(RCC->CFGR3, RCC_CFGR3_I2C1SW);
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_I2C1EN);
}
#endif
#ifdef I2C2
if (registerStruct==I2C2)
{
CLEAR_BIT(RCC->CFGR3, RCC_CFGR3_I2C2SW);
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_I2C2EN);
}
#endif
#ifdef I2C3
if (registerStruct==I2C3)
{
CLEAR_BIT(RCC->CFGR3, RCC_CFGR3_I2C3SW);
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_I2C3EN);
}
#endif
// Disable the I2C peripheral
CLEAR_BIT(registerStruct->CR1, I2C_CR1_PE);
// Configure timing
if (fastMode)
{
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_PRESC, 0x00 << I2C_TIMINGR_PRESC_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SCLL, 0x09 << I2C_TIMINGR_SCLL_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SCLH, 0x03 << I2C_TIMINGR_SCLH_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SDADEL, 0x01 << I2C_TIMINGR_SDADEL_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SCLDEL, 0x03 << I2C_TIMINGR_SCLDEL_Pos);
}
else
{
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_PRESC, 0x01 << I2C_TIMINGR_PRESC_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SCLL, 0x13 << I2C_TIMINGR_SCLL_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SCLH, 0x0F << I2C_TIMINGR_SCLH_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SDADEL, 0x02 << I2C_TIMINGR_SDADEL_Pos);
MODIFY_REG(registerStruct->TIMINGR, I2C_TIMINGR_SCLDEL, 0x04 << I2C_TIMINGR_SCLDEL_Pos);
}
// Stop and Restart will be generated by software
CLEAR_BIT(registerStruct->CR2, I2C_CR2_AUTOEND);
// Enable the I2C peripheral
SET_BIT(registerStruct->CR1, I2C_CR1_PE);
}
/**
* Sub-Function of i2c_communicate.
* Configures number of data bytes to send or receive in the current block.
*/
void configureBlockSize(I2C_TypeDef* registerStruct, int size)
{
if (size>255)
{
// Set number of bytes to send or receive in this block
MODIFY_REG(registerStruct->CR2, I2C_CR2_NBYTES, 255 << I2C_CR2_NBYTES_Pos);
// Prepare to transfer more blocks after this one
SET_BIT(registerStruct->CR2, I2C_CR2_RELOAD);
}
else
{
// Number of bytes to send or receive in the last block
MODIFY_REG(registerStruct->CR2, I2C_CR2_NBYTES, size << I2C_CR2_NBYTES_Pos);
// After this block, no more blocks will be transferred
CLEAR_BIT(registerStruct->CR2, I2C_CR2_RELOAD);
}
}
/**
* Perform an I²C transaction, which sends 0 or more data bytes, followed by receiving 0 or more data bytes.
*
* @param registerStruct May be either I2C1, I2C2 or I2C3
* @param slave_addr 7bit slave address (will be shifted within this function)
* @param send_buffer Points to the buffer that contains the data bytes that shall be sent (may be 0 if not used)
* @param send_size Number of bytes to send
* @param receive_buffer Points to the buffer that will be filled with the received bytes (may be 0 if not used)
* @param receive_size Number of bytes to receive
* @return Number of received data bytes, or -1 if sending failed
*/
int i2c_communicate(I2C_TypeDef* registerStruct, uint8_t slave_addr,
void* send_buffer, int send_size, void* receive_buffer, int receive_size)
{
int receive_count=-1;
// Set slave address (shifted 1 bit to the left)
MODIFY_REG(registerStruct->CR2, I2C_CR2_SADD, slave_addr << 1);
// Send data
if (send_size>0)
{
// Data direction
CLEAR_BIT(registerStruct->CR2, I2C_CR2_RD_WRN);
// Configure size of the first data block to send
configureBlockSize(registerStruct, send_size);
// Send start condition
SET_BIT(registerStruct->CR2, I2C_CR2_START);
// Send data
do
{
// Check for error
if (READ_BIT(registerStruct->ISR, I2C_ISR_NACKF | I2C_ISR_ARLO))
{
goto error;
}
// Send one byte when ready
if (READ_BIT(registerStruct->ISR, I2C_ISR_TXIS))
{
WRITE_REG(registerStruct->TXDR, *((uint8_t*)send_buffer));
send_buffer++;
send_size--;
}
// Configure size of next block, if requested
if (READ_BIT(registerStruct->ISR, I2C_ISR_TCR))
{
configureBlockSize(registerStruct, send_size);
}
}
// Loop until the transfer is complete
while (!READ_BIT(registerStruct->ISR, I2C_ISR_TC));
}
// Sending succeeded, start counting the received bytes
receive_count=0;
// Receive data
if (receive_size>0)
{
// Data direction
SET_BIT(registerStruct->CR2, I2C_CR2_RD_WRN);
// Configure size of the first data block to receive
configureBlockSize(registerStruct, receive_size);
// Send start or restart condition
SET_BIT(registerStruct->CR2, I2C_CR2_START);
// Receive data
do
{
// Check for error
if (READ_BIT(registerStruct->ISR, I2C_ISR_ARLO))
{
goto error;
}
// Fetch one received byte when ready
if (READ_BIT(registerStruct->ISR, I2C_ISR_RXNE))
{
*((uint8_t*)receive_buffer)=READ_REG(registerStruct->RXDR);
receive_buffer++;
receive_count++;
receive_size--;
}
// Configure size of next block, if requested
if (READ_BIT(registerStruct->ISR, I2C_ISR_TCR))
{
configureBlockSize(registerStruct, receive_size);
}
}
// Loop until the transfer is complete
while (!READ_BIT(registerStruct->ISR, I2C_ISR_TC));
}
// Send stop condition
SET_BIT(registerStruct->CR2, I2C_CR2_STOP);
return receive_count;
error:
// Restart the I2C peripheral
CLEAR_BIT(registerStruct->CR1, I2C_CR1_PE);
SET_BIT(registerStruct->CR1, I2C_CR1_PE);
//ITM_SendString("I2C bus error!\n");
return receive_count;
}
Die Funktion liefert nach der Übertragung die Anzahl der empfangenen Bytes zurück, oder -1 wenn das Senden fehlschlug. Anwendungsbeispiel:
int main()
{
init_io();
i2c_init(I2C2, false);
uint8_t send_buffer[]={0};
uint8_t receive_buffer[5];
i2c_communicate(I2C2, 8, send_buffer, 1, receive_buffer, 5);
}
Das obige Beispiel sendet ein Byte {0} an den Slave mit der Adresse 8. Danach werden 5 Bytes vom Slave empfangen.

USB Schnittstelle
Die USB Schnittstelle erfordert ein umfangreiches Softwarepaket. Beinahe alle Programmierer binden daher fertige Implementierungen in ihr Programm ein.
Die USB Schnittstelle funktioniert Interrupt-getrieben. Immer wenn die Hardware ein kleines Datenpaket gesendet oder empfangen hat, löst sie einen Interrupt aus. Der Interrupthandler hat die Aufgabe, Anfragen des Host zu beantworten und Nutzdaten mit dem Pufferspeicher auszutauschen. Wenn man den Mikrocontroller beim Debuggen anhält, fällt die USB Schnittstelle sofort aus.
Der Systemtakt muss entweder 48 MHz oder 72 MHz betragen und aus einem Quarz gewonnen werden. Der USB Clock Prescaler wird dementsprechend auf 1 oder 1,5 gestellt, um die USB Schnittstelle mit 48 MHz zu takten. Der APB Bus muss mit mindestens 10 MHz getaktet werden.
Die USB Buchse wird mit PA11 (D-) und PA12 (D+) verbunden.
An D+ gehört ein 1,5 kΩ Pull-Up Widerstand auf 3,3 V, welcher dem Host Computer signalisiert, dass ein Gerät angeschlossen wurde. Manche Boards schalten den Widerstand mit einen I/O Pin ein. Dadurch kann man den Host Computer dazu bringen, das USB Gerät erneut zu erkennen, ohne das Kabel abstecken zu müssen.
Bei allen STM32F3 können die USB und CAN Schnittstellen gleichzeitig verwendet werden. Der Pufferspeicher (außerhalb des RAM) ist so organisiert:
- STM32F302xB/C, STM32F303xB/C und STM32F373: haben 512 Bytes für USB + 512 Bytes für CAN.
- STM32F302x6/8, STM32F302xD/E und STM32F303xD/E: haben 1024 Bytes gemeinsam genutzten Speicher. Bei gleichzeitiger Nutzung belegt CAN die letzten 256 Bytes.
Bitte beachte meinen Hinweis zu CDC Geräten unter Linux, er erspart dir womöglich eine langwierige Fehlersuche.
Virtueller COM-Port mit Cube HAL
Auf der Webseite von STM gibt es den "STM32 Virtual COM Port Driver" zum Herunterladen, aber den braucht man seit Windows 8 nicht mehr. Linux und Mac brauchen auch keine Treiber-Installation.
Mit der STM32 Cube IDE/Cube MX kann man sich ein Projekt mit USB Unterstützung zusammenklicken. Das geht so:
- Ein neues Projekt anlegen, dabei den richtigen Mikrocontroller einstellen.
- Im Reiter Pinout & Configuration
- Bei System Core/RCC/High Speed Clock (HSE): Crystal/Ceramic Resonator einstellen.
- Bei System Core/SYS soll die Debug Option: Serial Wire und Timebase Source: SysTick gewählt werden.
- Bei Connectivity/USB/Device (FS) einschalten.
- Bei Middleware/USB_DEVICE, wo die Variante Class for FS IP: Communication Device Class (Virtual Port COM) gewählt werden muss.
- Suche Dir einen freien I/O Pin für die Status LED aus (bzw. nimm den Pin, der durch dein
Board vorgegeben ist).
- Klicke auf den Pin und wähle die Betriebsart GPIO Output.
- Gib dem Pin den Namen "LED" (rechte Maustaste, Enter User Label).
- Im Reiter Clock Configuration kontrollieren, ob HSE als Quelle eingestellt wurde und mittels PLL auf 48 MHz erhöht wird. Wenn dein Quarz nicht 8 MHz hat, musst du das hier noch einstellen.
Probiere das Programm zunächst ohne Änderungen aus. Der PC sollte im Gerätemanager einen neuen virtuellen COM Anschluss mit dem Namen "Serielles USB-Gerät (COMx)" oder "STMicroelectronics Virtual COM Port (COMx)" anzeigen.
Um Text vom Mikrocontroller an den PC zu senden, füge im Quelltext von main.c folgendes zwischen die genannten Markierungen ein:
/* USER CODE BEGIN Includes */
#include "usbd_cdc_if.h"
/* USER CODE END Includes */
...
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
// LED On
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
HAL_Delay(500);
// LED Off
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_RESET);
HAL_Delay(500);
// Send data
char msg[]="Hallo!";
CDC_Transmit_FS( (uint8_t*) msg, strlen(msg));
}
/* USER CODE END 3 */
Das Programm belegt etwa 20 kB Flash und 5 kB RAM. Davon dienen jeweils 1 kB als Sendepuffer und Empfangspuffer (kann man ändern). Die Ausgabe kann man mit einem Terminal-Programm (Baudrate ist egal) anzeigen.
Damit die Ausgabefunktionen der Standard C Library (z.B. printf, puts, putchar) auf USB geleitet werden, kannst du folgende Funktion implementieren:
// Redirect standard output to the USB port
int _write(int file, char *ptr, int len)
{
CDC_Transmit_FS( (uint8_t*) ptr, len);
return len;
}
Virtueller COM-Port ohne Cube HAL
Die USB CDC Implementierungen in
- STM32F303RE_usb_test.zip (für Nucleo-F303RE Board) und
- STM32F303CC_usb_test.zip (für das STM32F303CCT6 Board von RobotDyn)
stammen aus dem mikrocontroller.net Forum. Sie wurden ursprünglich vom Benutzer W.S. lizenzfrei veröffentlicht und dann von mehreren Mitgliedern verbessert. Der Quelltext ist sehr kompakt - nur zwei Dateien ohne weitere Abhängigkeiten. Auf dem PC braucht man dazu keine Treiber-Installation, im Fall von Windows ist mindestens Version 8 erforderlich.
Die Projekte wurden mit der "STM32 Cube IDE" erstellt. Ich gehe davon aus, daß der Code auf allen STM32F3 Modellen (mit USB) läuft. Die Initialisierung in der main.c und ein paar Einstellungen in den ersten Zeilen der usb.c müssen aber ans jeweilige Modell angepasst werden.
Das folgende Programm lässt die LED jede Sekunde aufblitzen und sendet dabei "Hello World!" über USB an den angeschlossenen Computer. Es belegt nur 5 kB Flash und 600 Bytes RAM. Davon dienen jeweils 256 Byte als Sendepuffer und Empfangspuffer (kann man ändern).
#include <stdio.h>
#include "stm32f3xx.h"
#include "usb.h"
// The current clock frequency
uint32_t SystemCoreClock=8000000;
// Counts milliseconds
volatile uint32_t systick_count=0;
// Interrupt handler
void SysTick_Handler()
{
systick_count++;
}
// Delay some milliseconds
void delay_ms(int ms)
{
uint32_t start=systick_count;
while (systick_count-start<ms);
}
// Change system clock to 48Mhz using 8Mhz crystal
void init_clock()
{
// Because the debugger switches PLL on, we may need to switch
// back to the HSI oscillator before we can configure the PLL
// Enable HSI oscillator
SET_BIT(RCC->CR, RCC_CR_HSION);
// Wait until HSI oscillator is ready
while(!READ_BIT(RCC->CR, RCC_CR_HSIRDY)) {}
// Switch to HSI oscillator
MODIFY_REG(RCC->CFGR, RCC_CFGR_SW, RCC_CFGR_SW_HSI);
// Wait until the switch is done
while ((RCC->CFGR & RCC_CFGR_SWS_Msk) != RCC_CFGR_SWS_HSI) {}
// Disable the PLL
CLEAR_BIT(RCC->CR, RCC_CR_PLLON);
// Wait until PLL is fully stopped
while(READ_BIT(RCC->CR, RCC_CR_PLLRDY)) {}
// Flash latency 1 wait state
MODIFY_REG(FLASH->ACR, FLASH_ACR_LATENCY, 1 << FLASH_ACR_LATENCY_Pos);
// Enable HSE oscillator
SET_BIT(RCC->CR, RCC_CR_HSEON);
// Wait until HSE oscillator is ready
while(!READ_BIT(RCC->CR, RCC_CR_HSERDY)) {}
// 48Mhz using the 8Mhz HSE oscillator with 6x PLL, lowspeed I/O runs at 24Mhz
WRITE_REG(RCC->CFGR, RCC_CFGR_SWS_HSI + RCC_CFGR_PLLSRC_HSE_PREDIV + RCC_CFGR_PLLMUL6 + RCC_CFGR_PPRE1_DIV2);
// Enable PLL
SET_BIT(RCC->CR, RCC_CR_PLLON);
// Wait until PLL is ready
while(!READ_BIT(RCC->CR, RCC_CR_PLLRDY)) {}
// Select PLL as clock source
MODIFY_REG(RCC->CFGR, RCC_CFGR_SW, RCC_CFGR_SW_PLL);
// Update variable
SystemCoreClock=48000000;
// Set USB prescaler to 1 for 48 MHz clock
MODIFY_REG(RCC->CFGR, RCC_CFGR_USBPRE, RCC_CFGR_USBPRE_DIV1);
}
void init_io()
{
// Enable USB
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_USBEN);
// Enable Port A and C
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN + RCC_AHBENR_GPIOCEN);
// PC13 = Output (for the LED)
MODIFY_REG(GPIOC->MODER, GPIO_MODER_MODER13, 0b01 << GPIO_MODER_MODER13_Pos);
// The following lines are not needed on STM32F303xD and xE
// PA11 = USB D-, alternate function 14 push/pull (see data sheet)
MODIFY_REG(GPIOA->AFR[1], GPIO_AFRH_AFRH3, 14 << GPIO_AFRH_AFRH3_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER11, 0b10 << GPIO_MODER_MODER11_Pos);
// PA12 = USB D+, alternate function 14 push/pull (see data sheet)
MODIFY_REG(GPIOA->AFR[1], GPIO_AFRH_AFRH4, 14 << GPIO_AFRH_AFRH4_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER12, 0b10 << GPIO_MODER_MODER12_Pos);
}
int main()
{
init_clock();
init_io();
UsbSetup();
// Initialize system timer
SysTick_Config(SystemCoreClock/1000);
while (1)
{
// LED On (Low)
WRITE_REG(GPIOC->BSRR, GPIO_BSRR_BR_13);
delay_ms(100);
UsbSendStr("Hello World!\n",10);
// LED Off (High)
WRITE_REG(GPIOC->BSRR, GPIO_BSRR_BS_13);
delay_ms(900);
}
}
Die Ausgabe kann man mit einem Terminal-Programm anzeigen.
Nach der Initialisierung mittels UsbSetup() wird die Funktion UsbSendStr() benutzt, um Zeichenketten zu senden. UsbSetup setzt voraus, dass der Systemtakt bereits korrekt konfiguriert ist. Die entsprechenden Zeilen habe ich oben fett hervorgehoben.
Für fortgeschrittene Programmierer hat Niklas Gürtler das USB-Tutorial mit STM32 im mikrocontroller.net Forum geschrieben. Er beschreibt dort detailliert, wie die USB Schnittstelle funktioniert.
Echtzeituhr
Die RTC besteht aus einem 32 kHz Quarz-Oszillator und einer Reihe verketteter Zähler, um auf Sekunden, Minuten, Stunden, Tage, Monate und Jahre zu kommen. Der Oszillator von der RTC läuft schon ohne Kalibrierung wesentlich geauer, als der Haupt-Quarz.
Zwei Alarm-Zeiten sind programmierbar und die Uhr kann sich den Zeitstempel von einem Ereignis merken.
Nach einem Stromausfall ohne bzw. mit leerer Batterie werden die Zähler automatisch auf 0 gesetzt und die Uhr angehalten.
Neben der Uhr enthält die batteriegepufferte Einheit je nach Modell 5 oder 16 so genannte "Backup Register", wo man 16 Bit Werte speichern kann.
Der LSE Oszillator nutzt nur sehr wenig Energie und ist daher bei falscher Beschaltung störanfällig. Die Leitungen zum sorgfältig ausgewählten Quarz sollen so kurz wie möglich sein und die Kapazitäten müssen genau berechnet werden.
Der Anschluss PC13 wird ebenfalls durch den Low-Power Schaltkreis der RTC versorgt, also auch durch die Backup Batterie. Er soll daher nur mit niedriger Frequenz geschaltet werden und bei High Pegel nicht belastet werden.
Die Application Note AN4759 beschreibt, wie man die RTC benutzt. Wenn der Systemtakt geringer ist als 230 kHz, dann muss man die Verwendung der Schatten-Register deaktivieren. In den folgenden Beispielen gehe ich davon aus, dass der Systemtak hoch genug ist.
RTC starten
Nach einem Stromausfall ist die Uhr zunächst gestoppt. Man kann sie per Software so starten:
void initRtc()
{
// Enable the power interface
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_PWREN);
// Enable access to the backup domain
SET_BIT(PWR->CR, PWR_CR_DBP);
// Enable LSE oscillator with medium driver power
MODIFY_REG(RCC->BDCR, RCC_BDCR_LSEDRV, 0b10 << RCC_BDCR_LSEDRV_Pos);
SET_BIT(RCC->BDCR, RCC_BDCR_LSEON);
// Wait until LSE oscillator is ready
while(!READ_BIT(RCC->BDCR, RCC_BDCR_LSERDY)) {}
// Select LSE as clock source for the RTC
MODIFY_REG(RCC->BDCR, RCC_BDCR_RTCSEL, RCC_BDCR_RTCSEL_LSE);
// Enable the RTC
SET_BIT(RCC->BDCR, RCC_BDCR_RTCEN);
}
Aufwachen
Nachdem die RTC gestartet ist, kann man sie benutzen, um regelmäßige Unterbrechungen zu erzeugen. Diese wiederum können verwendet werden, um den Mikrocontroller aus Sleep, Stop und Standby Zuständen auf zu wecken.
Das folgende ausführbare Beispiel zeigt, wie man damit die LED auf dem Nucleo-F303RE Board im Sekundentakt blinken lässt:
#include "stm32f3xx.h"
#include <stdio.h>
uint32_t SystemCoreClock=8000000;
// Redirect standard output to the serial port
int _write(int file, char *ptr, int len)
{
for (int i=0; i<len; i++)
{
while(!(USART2->ISR & USART_ISR_TXE));
USART2->TDR = *ptr++;
}
return len;
}
void init_io()
{
// Enable Port A
SET_BIT(RCC->AHBENR, RCC_AHBENR_GPIOAEN);
// PA5 = Output for the LED
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER5, 0b01 << GPIO_MODER_MODER5_Pos);
// PA2 (TxD) shall use the alternate function 7 (see data sheet)
MODIFY_REG(GPIOA->AFR[0], GPIO_AFRL_AFRL2, 7U << GPIO_AFRL_AFRL2_Pos);
MODIFY_REG(GPIOA->MODER, GPIO_MODER_MODER2, 0b10 << GPIO_MODER_MODER2_Pos);
}
void initSerial()
{
// Use system clock for USART2
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_USART2EN);
MODIFY_REG(RCC->CFGR3, RCC_CFGR3_USART2SW, 0b01 << RCC_CFGR3_USART2SW_Pos);
// Set baudrate
USART2->BRR = (SystemCoreClock / 9600);
// Enable transmitter of USART2
USART2->CR1 = USART_CR1_UE + USART_CR1_TE;
}
void initRtc()
{
// Enable the power interface
SET_BIT(RCC->APB1ENR, RCC_APB1ENR_PWREN);
// Enable access to the backup domain
SET_BIT(PWR->CR, PWR_CR_DBP);
// Enable LSE oscillator with medium driver power
MODIFY_REG(RCC->BDCR, RCC_BDCR_LSEDRV, 0b10 << RCC_BDCR_LSEDRV_Pos);
SET_BIT(RCC->BDCR, RCC_BDCR_LSEON);
// Wait until LSE oscillator is ready
while(!READ_BIT(RCC->BDCR, RCC_BDCR_LSERDY)) {}
// Select LSE as clock source for the RTC
MODIFY_REG(RCC->BDCR, RCC_BDCR_RTCSEL, RCC_BDCR_RTCSEL_LSE);
// Enable the RTC
SET_BIT(RCC->BDCR, RCC_BDCR_RTCEN);
}
void initWakeup()
{
// Unlock the write protection
WRITE_REG(RTC->WPR, 0xCA);
WRITE_REG(RTC->WPR, 0x53);
// Stop the wakeup timer to allow configuration update
CLEAR_BIT(RTC->CR, RTC_CR_WUTE);
// Wait until the wakeup timer is ready for configuration update
while (!READ_BIT(RTC->ISR, RTC_ISR_WUTWF)) {};
// Clock source of the wakeup timer is 1 Hz
MODIFY_REG(RTC->CR, RTC_CR_WUCKSEL, 0b100 << RTC_CR_WUCKSEL_Pos);
// The wakeup period is 0+1 clock pulses
WRITE_REG(RTC->WUTR,0);
// Enable the wakeup timer with interrupts
SET_BIT(RTC->CR, RTC_CR_WUTE + RTC_CR_WUTIE);
// Switch the write protection back on
WRITE_REG(RTC->WPR, 0xFF);
// Enable EXTI20 interrupt on rising edge
SET_BIT(EXTI->IMR, EXTI_IMR_MR20);
SET_BIT(EXTI->RTSR, EXTI_RTSR_TR20);
NVIC_EnableIRQ(RTC_WKUP_IRQn);
// Clear (old) pending interrupt flag
CLEAR_BIT(RTC->ISR, RTC_ISR_WUTF); // Clear in RTC
SET_BIT(EXTI->PR, EXTI_PR_PR20); // Clear in NVIC
}
void RTC_WKUP_IRQHandler()
{
// Clear interrupt flag
CLEAR_BIT(RTC->ISR, RTC_ISR_WUTF); // Clear in RTC
SET_BIT(EXTI->PR, EXTI_PR_PR20); // Clear in NVIC
// Toggle LED
GPIOA->ODR ^= GPIO_ODR_5;
}
int main()
{
init_io();
initRtc();
initWakeup();
initSerial();
while(1)
{
puts("Hello");
// Enter sleep mode
__WFI();
}
}
Achtung: Der Name des Interrupt-Handlers und die Kanal Nummer (hier 20) variieren je nach STM32 Modell. Schaue dazu in die Datei startup_stm32.s und in das Referenzhandbuch Kapitel "External and internal interrupt/event line mapping".
Während der Interrupt-Handler die LED blinken lässt, gibt das Hauptprogramm den Text "Hallo" auf dem Seriellen Port aus und legt sich dann schlafen. Das Interrupt-Signal der RTC weckt die CPU im Sekundentakt wieder auf.
RTC Lesen
Man kann die Uhrzeit und das Datum direkt aus den entsprechenden Registern auslesen. Die Hardware verwendet dabei Schatten-Register, die automatisch mit der langsamen RTC synchronisiert werden.
Das folgende Beispiel baut auf dem vorherigen Beispiel auf:
int main()
{
init_io();
initRtc();
initWakeup();
initSerial();
while(1)
{
// Extract digits from the RTC time register
uint8_t ht= (RTC->TR & RTC_TR_HT) >> RTC_TR_HT_Pos;
uint8_t hu= (RTC->TR & RTC_TR_HU) >> RTC_TR_HU_Pos;
uint8_t mnt= (RTC->TR & RTC_TR_MNT) >> RTC_TR_MNT_Pos;
uint8_t mnu= (RTC->TR & RTC_TR_MNU) >> RTC_TR_MNU_Pos;
uint8_t st= (RTC->TR & RTC_TR_ST) >> RTC_TR_ST_Pos;
uint8_t su= (RTC->TR & RTC_TR_SU) >> RTC_TR_SU_Pos;
// Print the time
printf("Time: %d%d:%d%d:%d%d\n", ht,hu, mnt,mnu, st,su);
// Extract digits from the RTC date register
uint8_t yt= (RTC->DR & RTC_DR_YT) >> RTC_DR_YT_Pos;
uint8_t yu= (RTC->DR & RTC_DR_YU) >> RTC_DR_YU_Pos;
uint8_t mt= (RTC->DR & RTC_DR_MT) >> RTC_DR_MT_Pos;
uint8_t mu= (RTC->DR & RTC_DR_MU) >> RTC_DR_MU_Pos;
uint8_t dt= (RTC->DR & RTC_DR_DT) >> RTC_DR_DT_Pos;
uint8_t du= (RTC->DR & RTC_DR_DU) >> RTC_DR_DU_Pos;
// Print the date
printf("Date: %d%d-%d%d-%d%d\n", yt,yu, mt,mu, dt,du);
// Enter sleep mode
__WFI();
}
}
Im Control Register RTC->CR kann man die Anzeige der Zeit beeinflussen:
- SUB1H Subtrahiere eine Stunde
- ADD1H Addiere eine Stunde (für Sommerzeit)
RTC Beschreiben
Datum, Uhrzeit und einige Bits im Control Register sind ziemlich gut gegen versehentliche Änderungen geschützt. Sie lassen sich nur im sogenannten Initialisierungs-Modus beschreiben, wenn der Schreibgeschutz aufgehoben wurde.
Man darf die reservierten Bits nicht verändern. Außerdem muss man nach jedem Schreibzugriff eine Synchronisation der Schatten-Register auslösen und abwarten. Deswegen ist es gut alle Bits im RTC->TR bzw. RTC->DR Register gleichzeitig zu setzen.
Die folgende Prozedur ändert Datum und Uhrzeit unter Berücksichtigung der obigen Aspekte:
/**
* Write digits to the RTC time register in 24h format.
* @param ht tens of hour
* @param hu ones of hours
* @param mnt tens of minutes
* @param mnu ones of minutes
* @param st tens of seconds
* @param su ones of seconds
*/
void RTC_write_time(uint8_t ht, uint8_t hu, uint8_t mnt, uint8_t mnu, uint8_t st, uint8_t su)
{
// Calculate the new value for the time register
uint32_t tmp=READ_REG(RTC->TR);
tmp &= ~(RTC_TR_HT+RTC_TR_HU+RTC_TR_MNT+RTC_TR_MNU+RTC_TR_ST+RTC_TR_SU+RTC_TR_PM); // Keep only the reserved bits
tmp += (uint32_t) ht << RTC_TR_HT_Pos;
tmp += (uint32_t) hu << RTC_TR_HU_Pos;
tmp += (uint32_t) mnt << RTC_TR_MNT_Pos;
tmp += (uint32_t) mnu << RTC_TR_MNU_Pos;
tmp += (uint32_t) st << RTC_TR_ST_Pos;
tmp += (uint32_t) su << RTC_TR_SU_Pos;
// Unlock the write protection
WRITE_REG(RTC->WPR, 0xCA);
WRITE_REG(RTC->WPR, 0x53);
// Enter initialization mode
SET_BIT(RTC->ISR, RTC_ISR_INIT);
// Wait until the initialization mode is active
while (!READ_BIT(RTC->ISR, RTC_ISR_INITF)) {};
// The 24h format is already the default
// CLEAR_BIT(RTC->CR, RTC_CR_FMT);
// Update the time register
WRITE_REG(RTC->TR,tmp);
// Leave the initialization mode
CLEAR_BIT(RTC->ISR, RTC_ISR_INIT);
// Trigger a synchronization of the shadow registers
CLEAR_BIT(RTC->ISR, RTC_ISR_RSF);
// Wait until the shadow registers are synchronized
while (!READ_BIT(RTC->ISR, RTC_ISR_RSF)) {};
// Switch the write protection back on
WRITE_REG(RTC->WPR, 0xFF);
}
/**
* Write digits to the RTC date register.
* @param yt tens of year
* @param yu ones of year
* @param mt tens of month
* @param mu ones of month
* @param dt tens of day
* @param du ones of day
* @param wdu week day (1-7)
*/
void RTC_write_date(uint8_t yt, uint8_t yu, uint8_t mt, uint8_t mu, uint8_t dt, uint8_t du, uint8_t wdu)
{
// Calculate the new value for the date register
uint32_t tmp=READ_REG(RTC->DR);
tmp &= ~(RTC_DR_YT+RTC_DR_YU+RTC_DR_MT+RTC_DR_MU+RTC_DR_DT+RTC_DR_DU+RTC_DR_WDU); // Keep only the reserved bits
tmp += (uint32_t) yt << RTC_DR_YT_Pos;
tmp += (uint32_t) yu << RTC_DR_YU_Pos;
tmp += (uint32_t) mt << RTC_DR_MT_Pos;
tmp += (uint32_t) mu << RTC_DR_MU_Pos;
tmp += (uint32_t) dt << RTC_DR_DT_Pos;
tmp += (uint32_t) du << RTC_DR_DU_Pos;
tmp += (uint32_t) wdu << RTC_DR_WDU_Pos;
// Unlock the write protection
WRITE_REG(RTC->WPR, 0xCA);
WRITE_REG(RTC->WPR, 0x53);
// Enter initialization mode
SET_BIT(RTC->ISR, RTC_ISR_INIT);
// Wait until the initialization mode is active
while (!READ_BIT(RTC->ISR, RTC_ISR_INITF)) {};
// Update the time register
WRITE_REG(RTC->DR,tmp);
// Leave the initialization mode
CLEAR_BIT(RTC->ISR, RTC_ISR_INIT);
// Trigger a synchronization of the shadow registers
CLEAR_BIT(RTC->ISR, RTC_ISR_RSF);
// Wait until the shadow registers are synchronized
while (!READ_BIT(RTC->ISR, RTC_ISR_RSF)) {};
// Switch the write protection back on
WRITE_REG(RTC->WPR, 0xFF);
}
int main()
{
initRtc();
...
// Change the time to 18:33:45
RTC_write_time(1,8, 3,3, 4,5);
// Change the date to 19-03-25 (25th March 2019), 1=monday
RTC_write_date(1,9, 0,3, 2,5, 1);
...
}
RTC kalibrieren
Die RTC erreicht normalerweise ohne Kalibrierung eine Abweichung von maximal zwei Sekunden pro Tag. Durch Kalibrierung kann man die Genauigkeit weiter verbessern. Sollte deine Uhr ohne Kalibrierung um mehr als 5 Sekunden pro Tag abweichen, liegt mit Sicherheit ein Hardwarefehler vor.
Um die Uhr ohne teure Messinstrumente grob zu kalibrieren lässt man sie einige Tage lang laufen und ermittelt dabei ihre Abweichung von der soll-Geschwindigkeit durch Vergleich mit einem präzisen Zeitserver.
Das RTC->CALR Register kann erst nach Deaktivierung des Schreibschutzes verändert werden. Wenn die Uhr zu langsam läuft, setzt man das Bit CALP, um die Uhr genau 42,206 Sekunden pro Tag zu beschleunigen. Dann reduziert man ihre Geschwindigkeit durch den Wert in den CALM Bits. Jede Stufe dort entspricht 0,0824 Sekunden pro Tag.
Wenn die Uhr zum Beispiel 4 Sekunden pro Tag zu langsam wäre, ergäbe sich folgende Rechnung:
Abweichung: 4,000 Sekunden CALP: -42,206 Sekunden (setze RTC->CALR.CALP auf 1) CALM: 464 * 0,0824 = +38,234 Sekunden (setze RTC->CALR.CALM auf 464) =========================================== Summe: 0,028 Sekunden
Power Management
Indem man Taktsignale für I/O Funktionen deaktiviert oder verlangsamt, spart man bereits eine Menge Strom. Darüber hinaus gibt es die folgenden besondere Zustände für den ARM Kern:
| Modus | Eintritt | Aufwachen | Beschreibung |
|---|---|---|---|
| WFI Sleep | __WFI() | Interrupt | Warte auf Interrupt. Nur die CPU wird angehalten. |
| WFE Sleep | __WFE() | Interrupt oder Ereignis | Warte auf Ereignis. Nur die CPU wird angehalten. |
| Stop | PDDS=1, LPDS=1, SLEEPDEEP=1 + __WFI() oder __WFE() | EXTI Leitung, configuriert im EXTI Register. | Taktsignale von HSI/HSE sind deaktiviert. Die I/O Pins, Register und RAM bleiben unverändert. Debugging ist nicht möglich. |
| Standby | PDDS=1, LPDS=0, SLEEPDEEP=1 + __WFI() oder __WFE() | Steigende Flanke an WKUP Pin, RTC Alarm, externer Reset am NRST, IWDG Reset. | Taktsignale von HSI/HSE sind deaktiviert. RAM Inhalte gehen verloren. Nur die Backup Register bleiben erhalten. Die I/O Pins werden hochohmig, außer TAMPER, WKUP und NRST. Debugging ist nicht möglich. Zum Aufwachen muss der Controller neu starten. |
Wenn der WFI/WFE Sleep innerhalb einer Interruptroutine aktiviert wurde, kann er nur durch einen höher priorisierten Interrupt aufgeweckt werden. Wenn gerade ein Ereignis ansteht, während __WFE() augerufen wird, wird nur das Ereignis gelöscht und kein Sleep Modus aktiviert.
Durch Setzen von Bit 1 (SLEEPONEXIT) im Register SCB->SCR aktiviert man die "Sleep on exit" Funktion. Diese bewirkt, dass der Prozessor nach Abarbeitung jeder Interruptroutine automatisch in den WFI Sleep Modus geht.
Wenn im SCB->SCR Register das Bit 4 (SEVONPEND) gesetzt ist, löst ein anstehender Interrupt zugleich ein Ereignis aus, selbst wenn der Interrupt nicht freigeschaltet ist.
Fließkomma-Einheit
Float hat ungefähr 6 genaue Stellen, während double Zahlen ungefähr 15 genaue Stellen haben.
Die FPU des Mikrocontrollers beschleunigt float Operationen um Faktor 10, das ergibt bei 72 MHz etwa 4500 Multiplikationen pro Millisekunde. Double Berechnungen muss die CPU jedoch ohne Hilfe der FPU berechnen, damit schafft sie nur 330 Multiplikationen pro Millisekunde.
Beachte dass Fließkomma-Literale standardmäßig double sind. Float Zahlen schreibt man mit dem Suffix "f", zum Beispiel 3.14159f. Beachte auch, dass die normalen Funktionen der <math.h> Bibliothek auf double basieren. Für float musst du die "f" Versionen nehmen, z.B. sinf() anstatt sin().
Bevor man auf diesem Mikrocontroller float nutzen kann, muss die FPU eingeschaltet werden, sonst bricht das Programm mit einer HardFault Exception ab. Das geht so:
void SystemInit()
{
// Switch the FPU on
SCB->CPACR = 0x00F00000;
}
Die SystemInit() Funktion wird vor main() ausgeführt, was zwingend notwendig ist, wenn innerhalb von main() float verwendet wird.
Die relevanten Compiler-Optionen zur Nutzung der FPU werden von der IDE wie folgt vorgegeben:
- -mfpu=fpv4-sp-d16 -mfloat-abi=hard
Theoretisch könnte man den Compiler mit float-abi=soft auf die weniger effiziente Berechnung in Software umstellen, aber damit funktioniert die vorkompilierte C-Bibliothek nicht. Das Programm stürzt damit schon vor Ausführung der main() Funktion ab.
Die folgenden Linker-Optionen aktivieren die Unterstützung von float in printf() und scanf():
- -u _printf_float -u _scanf_float
Wenn man die FPU innerhalb von Interrupt-Routinen verwendet, müssen deren Register auf den Stack gesichert werden. Die dazu notwendigen Bits sind nach einem Reset bereits standardmäßig richtig gesetzt:
// Enable lazy stacking of FPU registers for interrupts SET_BIT(FPU->FPCCR, FPU_FPCCR_LSPEN_Msk + FPU_FPCCR_ASPEN_Msk);